Опыт изготовления и настройки коптера
В прошлые выходные у нас выпал снег и стало весьма холодно на улице. Летать стало менее комфортно.
Полеты на стандартной раме дома чреваты сломанными винтами и повреждённой техникой. 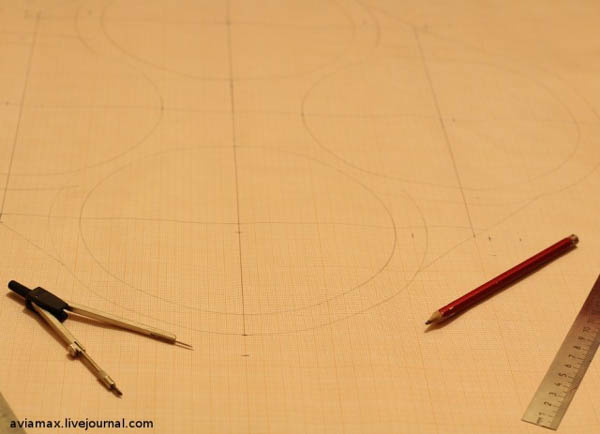
Решил собрать облегчённую раму для квадрокоптера из пенопласта.
При прорисовке основное внимание уделял жесткости конструкции и уменьшению вибрации моторов. Заказал моторы. Исходя из рекомендуемых диаметров винтов нарисовал на миллиметровке чертёж будущей рамы. 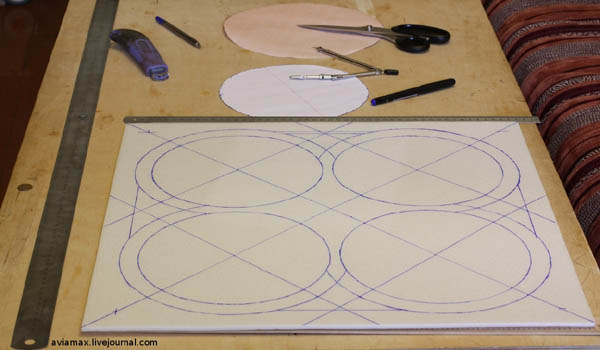
Первый слой - 5мм пенопласт. 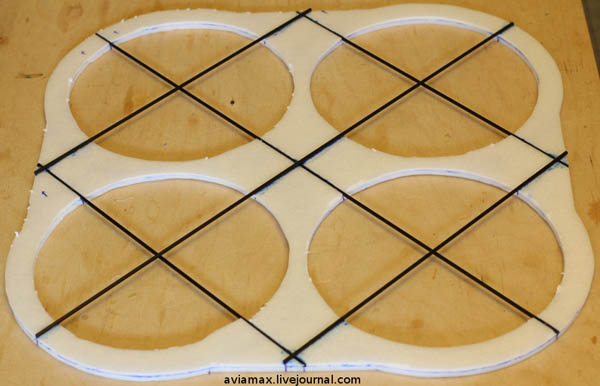
Второй слой 3 мм пенопласт и три карбоновые трубки диаметром 3мм. 
Третий слой 3мм пенопласт и еще три карбоновые трубки. 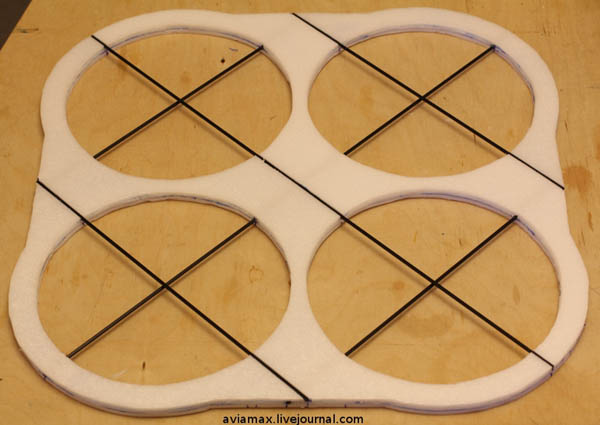
В итоге получаем довольно жесткое основание 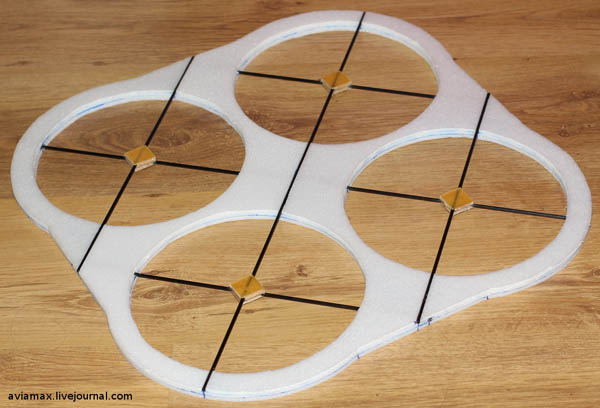
Площадки для моторов сделал из трех слоев стеклотекстолита и бальзовых пластинок толщиной 3мм
Для дальнейшей постройки мне нужны моторы и винты... Прошёл месяц. Приехали моторы и регуляторы хода. За это время продумал компоновку.
Не понимаю как американцы живут с их почтой. Заказал, 2-3 дня и посылка приехала. Не интересно.
Ни тебе перед таможней подождать... Ни на сортировке недельку полежать... Это же разом все строить придётся. 
Продолжаю строить самодельную пенопластовую раму для квадрокоптера 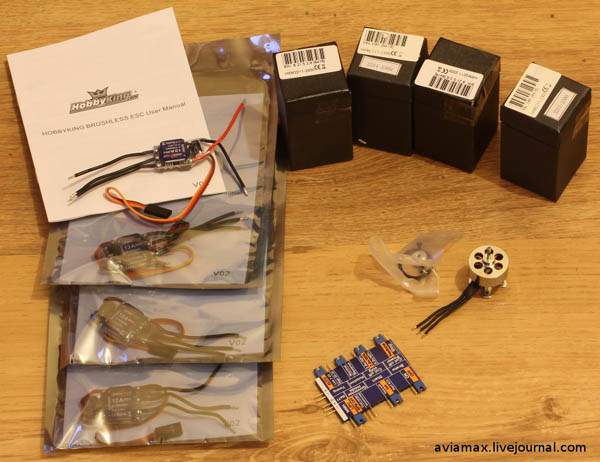
Регуляторы хода имеют возможность изменения направления вращения программным путем.
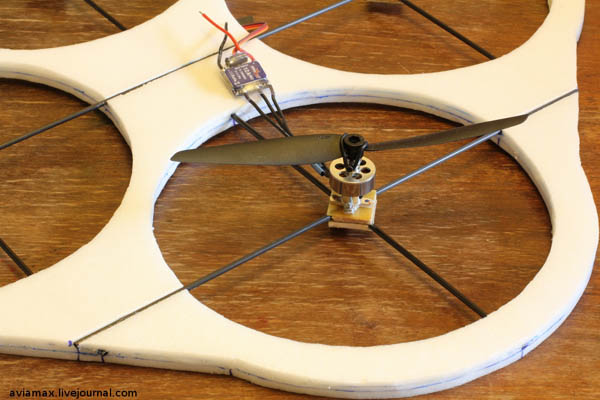
Для большей надёжности и экономии веса регуляторы припаял к моторам. 
Из упаковочного пенопласта толщиной 30 мм сделал постамент для платы управления. 
Из этого же пенопласта выполнен батарейный отсек и ножки.
Батарею решил расположить в нижней части рамы. Там же разместились регуляторы.
По краям рамы сделал ножки. Они довольно высокие и можно установить ещё один комплект моторов.
Вес на данном этапе (моторы, регуляторы, АКБ, рама) 306гр.
Теперь осталось раздобыть мозги :).... 
Поскольку первая приехала плата HK Quadcopter Control Board v2, она и была установлена для первых полётов. Для крепления платы управления в пенопласт я вклеил нейлоновые стойки, оставшиеся от деревянной рамы. 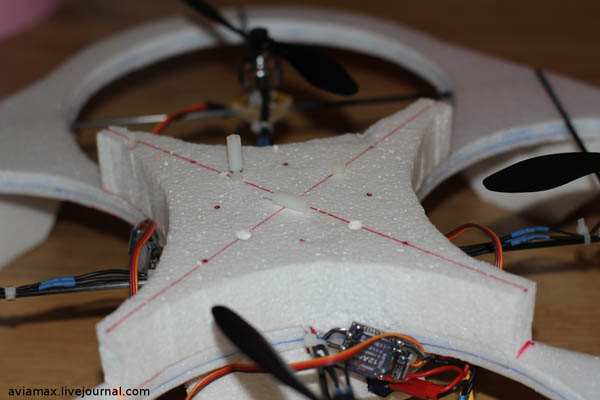
Предусмотрел ориентацию как + так и X. Не долго думая обозначил переднюю часть кусочком красной изоленты.
В будущем рама будет обрастать пенопластом, так что красота пока не нужна. Настройки регуляторов HK blue series: 1. Батарея NiMH (def LiPo) - на самом деле у меня LiPo батарея, просто не хочу получить отсечку на одном из моторов во время полета.
2. Cut-off volt 2.8v/50% (def 3.0v/50%) - самопроизвольные флипы не любим, стремимся исключить отсечку.
3. Cut-off Power Reduce (def)
4. Switching Frequency 16kHz (def 8kHz ) - К сожалению этот параметр не доступен через карту для программирования. Значение по-умолчанию оптимизировано для 2-полюсных моторов inrunner. Для outrunner рекомендуется 16 kHz. Выставляем руками через stick programming.
5. Timing AUTO (def)
6. Гувернер выключен (def)
7. Start ACC (def soft) - сглаживание не нужно, нужен быстрый отклик.
8. Brake Off(def)
9. Rotation - зависит от ориентации винта. Я припаял моторы к регуляторам для уменьшения веса и потерь на разъемах. 
Перед первым полётом плату HK Quadcopter Control Board v2 надо настроить:
Проверяем правильность каналов на аппаратуре. 1. Снимаем винты.
2. Устанавливаем ручку газа на ноль
3. Включаем питание на квадрокоптере
4. Активируем двигатели - для mode 2 газ в минимум, руль поворота вправо до упора. Должен загореться красный светодиод, сигнализирующий о готовности платы к полёту. До этого момента моторы не включатся (исключение - режим калибровки газа).
5. При отклонение ручки руля высоты вперед задний мотор должен увеличить обороты, передний уменьшить. Если происходит наоборот - реверсируйте этот канал на передатчике и проведите повторную проверку.
6. При отклонение ручки элеронов влево правый двигатель должен увеличить обороты, левый уменьшить. Если необходимо реверсируйте этот канал на передатчике
7. При отклонение ручки руля направления налево передний и задний двигатель должны уменьшить обороты. Если необходимо реверсируйте этот канал на передатчике Если светодиод на шаге 4 не загорелся: 1. Проверяем соединения приемник-плата управления, ищем раскладку каналов в документации на аппаратуру.
2. Пробуем газ вниз, руль поворота влево (канал руля поворота требует инверсии)
3. установть end-point на газе чуть ниже
4. Установить газ в максимум (канал газа требует инверсии) Калибруем диапазон газа на регуляторах. 1. Проверяем что винты все ещё не установлены.
2. Выключаем питание на квадрокоптере
3. Потенциометр yaw выставляем в ноль.
4. Включаем передатчик
5. Выставляем газ на максимум
6. Включаем питание на квадрокоптере
7. Ждем примерно 2 сек. Регуляторы пикнут 2 раза.
8. Выставляем газ в минимум. Моторы пикнут - esc подтвердил окончание калибровки газа.
9. Отключаем питание на квадрокоптере
10. Возвращаем потенциометр yaw в среднее положение. Помним что пока yaw в нуле сигнал с канала газа приёмника попадает на все регуляторы. Ручки руля высоты и элеронов в этом режиме не влияют на скорость моторов. Проверяем работу гироскопов на плате. 1. Проверяем что винты все ещё не установлены
2. Активируем двигатели - для mode 2 газ в минимум, Rudder вправо до упора. Должен загореться красный светодиод.
3. Cтавим газ на 40%
4. Наклоняем квадрокоптер вперёд. Передний мотор должен увеличить обороты, стремясь скомпенсировать поворот.. Если увеличил обороты задний мотор требуется, реверсировать.гироскоп тангажа (pitch)
5. Наклоняем квадрокоптер влево. Левый мотор должен увеличить обороты. Если требуется - 4вреверсировать крен (roll)
6. Если повернуть по часовой стрелке передний и задний двигатели должны увеличить обороты.Если требуется -реверсировать канал рысканья (Yaw) Реверсирование гироскопов 1. Проверяем что винты все ещё не установлены
2. Выключаем питание на квадрокоптере
3. Потенциометр Roll ставим в ноль
4. Включаем передатчик
5. Включаем питание на квадрокоптере
6. Светодиод мигает несколько секунд и погасает.
7. Переместите ручку канала который требуется реверсировать
8. Светодиод начинает моргать непрерывно
9. Выключаем питание на квадрокоптере
10. За одно включение можно реверсировать только один канал. После этих операций можно установить винты. Выставить потенциометры на 50% и попробовать проверить квадрокоптер в руках на небольших оборотах. Операция опасная -держать надо так, чтобы не задеть винтов. В случае неправильной установки реверса гироскопов квадрокоптер будет стремиться «разогнать вращение» . Наклоняя в разные стороны проверяем что квадрокоптер «сопротивляется». 
Подключение приемника
В общем случае необходимо соединить 4 канала Обозначение
на плате Канал
приемника
AIL Aileron Элероны
ELE Руль высоты
THR Газ
RUD Руль направления В случае если порядок каналов на приемнике и плате совпадает, для соединения можно использовать 2 кабеля. 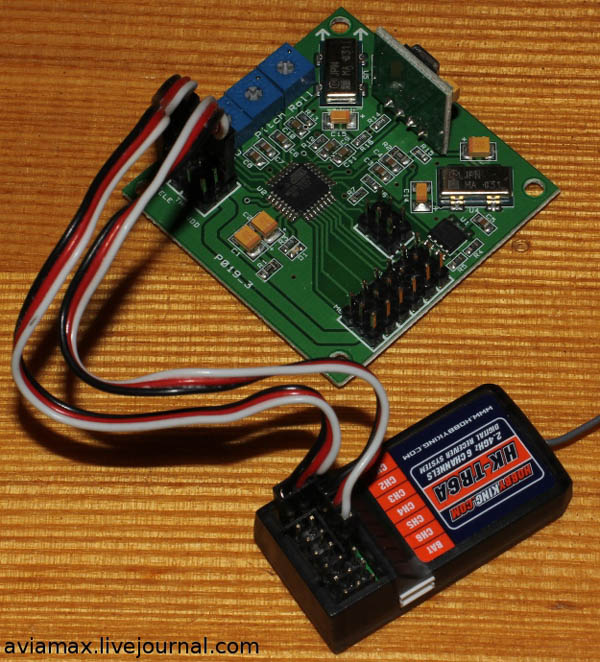
Первый подключен как обычно в первый канал. Сигналы: общий, +5v, сигнал канала 1.
Второй соединяет сигнальные провода каналов 2,3,4. Подключение моторов
Плата идет запрограммированная на ориентацию +.
Стрелкой на плате указано направление полета (смотрит на 1-й мотор).
M1 - регулятор хода, передний мотор (по час стрелке)
M2 - регулятор хода, левый мотор (против час стрелке)
M3 - регулятор хода, правый мотор (против час стрелке)
M4 - регулятор хода, задний мотор (по час стрелке) | 