5 минут ... полет нормальный

С детства любил все что связано с авиацией. Полеты на самолетах для меня были праздником. Взлет, облака, земля, машины, дороги, дома как игрушечные, посадка. Моя мечта летать как выросту, стать пилотом, не осуществилась. Сейчас взрослый человек, дети есть, работа. С возрастом игрушки становятся дороже и сложнее, но мечта летать осталась. Как говорится прогресс не стоит на месте, и моя мечта в какой то мере стала осуществима. С развитием технологий появилась возможность создания управляемых многомоторных летательных аппаратов (три, квадро, гексо, окто и т. д. коптеры) с установкой камер на борт этих устройств и управления аппаратами от первого лица, через очки (FPV)
С недавних пор увлекся созданием данных летательных аппаратов. Все началось с видео ролика как обычный офисный работник за 120 минут собирает квадрокоптер.
Мне понадобилось год для сборки, отладки, понять что к чему и т. д.
Занятие не из дешевых конечно, но оно того стоит, тем более, что со временем все становится дешевле и надежней, отходит на второй план, а то и вовсе пропадают некоторые сложные моменты в отладке и потребности определенных устройств, наличие компьютера и т. д.
В данном обзоре хочу описать вам несколько товаров, а так же, по мере описи этих продуктов хочу, как бы в невзначай пояснить как это все состыковать между собой и получит от данного конструктора неплохую платформу для поднятия в небо не сложной ФПВ системы, а то и дать необходимый толчок другим участникам в приобретении увлекательного хобби.
Практически все покупки можно произвести на одном сайте, в данном случае большинство приобреталось в онлайн магазине www.hobbyking.com
А скидки на некоторые товары можно найти здесь rcsearch.ru/hobbyking/buddy/
Всевозможные ответы на большинство вопросов по коптеро-строению вы найдете на форуме forum.rcdesign.ru/f123/
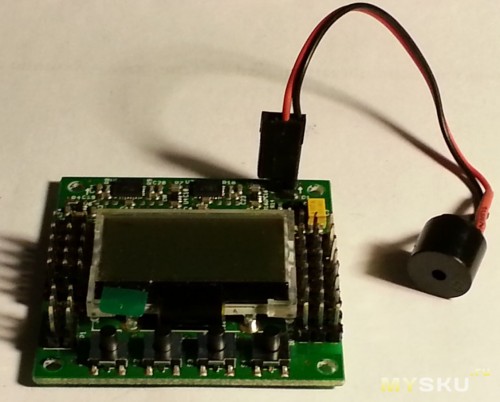
И так, начнем с мозгов нашего летательного аппарата (24-30$):

Данный контроллер подкупает своей простотой и дешевизной, а еще он содержит экран для настройки, что полностью исключает использование компьютера, считаю очень весомый аргумент в полевых условиях.
   
В контроллер вложены разные конфигурации летательных аппаратов которые легко выбираются в меню устройства, очень удобно организован интерфейс меню, есть возможность прикрутить монитор напряжения аккумулятора (очень важный параметр, так как требуется пристально следить за напряжением батареи, иначе можно загубить аккумулятор за один полет), так же есть возможность настройки коэффициентов PI (хотя я не трогал этот раздел, у меня аппарат взлетел, что называется с коробки), есть калибровка датчиков, стиков аппаратуры и многое другое, а в новой версии ПО (которое можно залить на устройство) имеется возможность подключения приемника управляемого контроллером по одному каналу (CPPM режим).
В контроллере в качестве датчиков используются гироскопы и акселерометр, что дает очень не плохие результаты в плане стабильности полета и в частности использования аппарата для ФПВ полетов (полеты по очкам), а так же возможность установки на борт видеокамеры для съемок видео и фото материалов.
Как я и описывал выше, контроллер полетел у меня без особых настроек, поразила стабильность полета коптера, послушность в управлении, удобство настройки.
На сайте продавца имеется мануал на русском языке.
Так же содержится новая прошивка (v1.2)
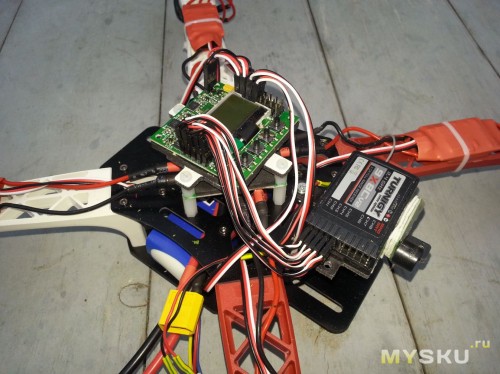
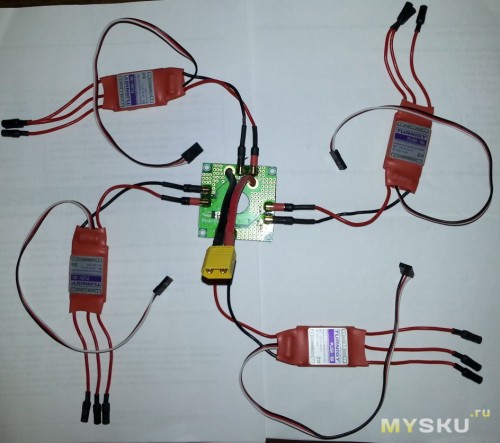
Вот общий вид того, что будет описано в обзоре по частям.
Теперь подошла очередь обзора рамы нашего летательного аппарата (11$):
             
Как и контроллер, рама бюджетный вариант, стоит 11 долларов, приятная комплектация, все узлы выточены и собраны добротно, распознание рамы в полете удовлетворительно (за счет цветных лучей).
Вес рамы в пределах 300 грамм, что вообще то великовато для таких размеров, но подкупает своей аккуратностью и сборкой. В комплекте с рамой имеется все для полной сборки, включая ключ для болтиков и стяжки. Так же инструкция имеется в наличии, ремешок и липучки для крепления аккумулятора. По поводу краше устойчивости пока ничего не скажу, особых падений не было, но в инете видел ролики, как по этой раме топчется и кидают со всего размаху об пол, это конечно не показатель, все должно проверяться в деле, под полную загрузку моторами и аккумуляторами, тогда будет более понятна устойчивость к падениям.
В общем рама — конструктор, на будущее можно заказать еще один комплект, не дорогая, как на замену лучей для ЧП.
Так же можно приобрести раму такого же образца, но с основой неприспособленной для соединения регуляторов скорости, но я его приобретал отдельно, так как мне важна оперативная замена всех узлов в случае краша.
Блок для соединения регулей (2-4$).

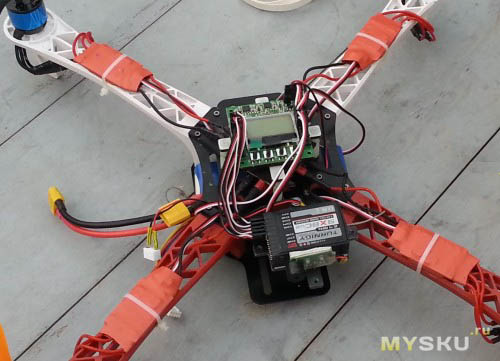
Фото платки установленной на аппарат, не особо видно, находится под контроллером, установлена вверх паралоном, в нее подключены питающие разъемы регуляторов.
Фото платки на аппарате

На плате имеются разъемы для подключения регуляторов скоростей, по два с каждой стороны, положительный и отрицательный контакт соответственно (красный плюс, черный минус), кабель с разъемом для подключения аккумулятора, а так же два тонких контакта для расширений (например подключения подсветки или отвода мониторинга вольтажа на плату контроллера). Плату можно крепить на раму стойками пластиковыми, но есть один отрицательный момент в данном изделии, отверстия для крепления немного смещены к центру, особо конечно это меня не напрягает, можно раз сверлить или вовсе забить на это, так как пластиковые стойки которые я использовал для крепления платки нормально с деформировались и стали как надо. Конечно в целях экономии вы могли бы исключить сей девайс из данного конструктора и просто тупо спаять провода от регулей в кучу, но на мой взгляд не особо дорого стоит аккуратное расположение крепления на аппарате, да и при краше или поломке электроники будет оперативная замена с последующим продолжением полетов.
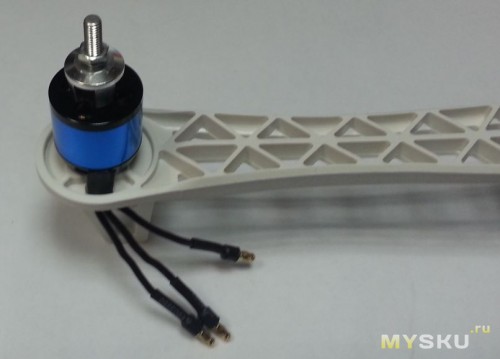
Моторы, их потребуется 4 штуки (цена за каждый 12,42$):
      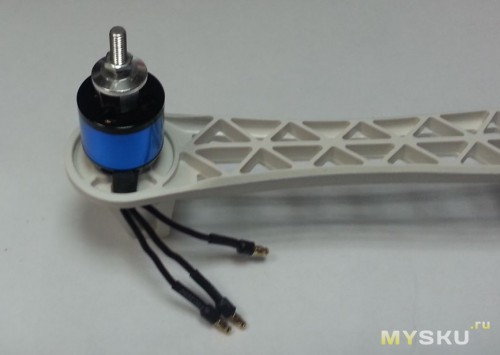 
Очень хороший и бюджетный мотор, славная комплектация, отличные параметры для собираемого мною аппарата. Хорош многим, но большой минус, постоянно в бэкдоре. Хотите купить, подписывайтесь на рассылку новостей об этом товаре и ловите момент. Закажите на один мотор больше, на черный день, хотя в комплектацию включен ремкомплект, но все же.
В комплекте с мотором идут все, что требуется, для разных вариантов крепления пропеллеров и крепления самого мотора.
Данное изделие является одним из дорогих в нашем конструкторе, так как их требуется 4 штуки.
Теперь переходим еще к одному устройству требующему более значительного капиталовложения.
Регуляторы скорости (11,90$):

Так же как и моторы их требуется 4 шт., по одному на каждый мотор и так же как и моторы они постоянно находятся в бэкдоре у продавца, подписывайтесь на рассылку данного девайся и ловите момент или можете просто зарезервировать их оплатив и ждать появления. С самого начала начал пользоваться плюшами, ни разу не подвели они меня, не греются (если правильно подобран ампераж), не горят.
Аккумулятор (13$):

Ну, что я могу сказать про данный элемент питания? В наличии у меня имеется вида четыре аккумулятора для разных целей, первым моим элементом был трех амперный Турнига, чуток дешевле обозреваемого, больше, тяжелее, потом приобрел на пять ампер, монстр еще тот.
Данный аккумулятор приятно легче и меньше бывших, за счет этого время полета продлевается, да и токоотдача на нем выше чем те которые раньше были. Соответственно из этих преимуществ с ним легче и приятней будет крутить флипы (кувыркаться, делать мертвые петли, я кстати так и не научился пока этому жуткому действию. Разъем на аккумуляторе как раз подходит к выше описываемой платке сопряжения регулей
А как и чем заряжать такой аккумулятор, если только его взять? Довольно таки сложный процесс заряда таких аккумуляторов не советую заряжать подручными средствами, чревато гибелью банок полностью или частично дело в том, что аккумулятор состоит из нескольких пластин (в описываемом 3 шт.), пластины соединены последовательно, от каждой пластины идет отвод для балансировки оной, процесс зарядки может иметь несколько режимов (дальнейшая опись мое ИМХО, на сколько я понял тему) например аккумулятор сел и вы по быстрому хотите продолжить полеты, вы заряжаете обычным образом до полного заряда всего аккумулятора, этот режим не желателен, но допустим для правильного заряда используется балансировочный разъем, зарядное устройство заряжает одновременно все банки аккумулятора, но все таки следит за зарядом каждой банки по отдельности, таким образом достигается правильная зарядка аккумулятора в целом, аккумулятор при такой зарядке будет служить верой и правдой полностью все циклы своей жизни ну и существует еще режим консервации аккумулятора, это на тот случай, если долгое время вы не собираетесь пользоваться им, зарядник снижает заряд банок до режима хранения и вам не грозит некоторое время потеря аккумулятора путем саморазряда. Добавлю еще то, что данные типы аккумуляторов нельзя разряжать ниже допустимой нормы, иначе происходят безвозвратные химические процессы приводящие к гибели аккумулятора в целом или частично. И еще рекомендую поставить на борт зуммер индикации напряжения аккумулятора.
Зуммер индикации напряжения аккумулятора ($3.99):


Довольно таки нужный девайс, настоятельно рекомендую потратится на него (можно и без него, например настроить на описываемом контролере мониторинг).
Устройство подключается к балансировочным клемма на аккумуляторе (тот штекер с четырьмя проводками на описываемом выше аккумуляторе).
Очень простое устройство, определяет общее напряжение аккумулятора. Пи снижении напряжения аккумулятора к допустимому порогу, начинает подавать сигналы и моргать синим светодиодом, дальнейшее понижение напряжение повлечет увеличение частоты сигнала и задействуется красный светодиод, ну а дальше уже произойдет отключение моторов, падение, краш, возможен выход из строя аккумулятора или часть банок его, не доводите до таких моментов и ваши затраты значительно сократятся.
Зарядное устройство, а точнее два зарядника ($11.93 или 43$):
     
Суперская зарядка, очень доволен устройством!!!
В комплекте разные переходники для подключения всевозможных аккумуляторов. Так как зарядник не укомплектован блоком питания, имеются крокодилы для подключения к внешним источникам питания.
Вообще тема с блоками питания для запитки сего зарядника для меня была существенна (стоимость БП с параметрами по вольтажу была довольно таки великовата), я готов был приобрести для него специализированный, мощный блок питания, но все обошлось малыми денежными жертвами.
Для запитки этого зарядника (да и других подобных устройств) на данный момент используется блок питания компьютера, выходной ампераж и вольтаж достаточны для зарядки парка моих аккумуляторов, в частности у меня самым мощным аккумулятором является 5 амперный. Зарядку аккумуляторов можно производить да же во время работы компьютера (ВНИМАНИЕ!!! все действия вы можете производить на свой страх и риск, будьте бдительны при таком способе использования БП компьютера, не оставляйте без присмотра процесс зарядки от начала и до конца.)
Способ подключения зарядника к БП компьютера
  
Этот агрегат может быть подключен к компьютеру для мониторинга процесса зарядки, в комплекте присутствует кабель юзби и программное обеспечение для компьютера на компакт диске.
Так же в комплект входит датчик температуры, устройство способно распознать перегрев аккумулятора в процессе зарядки и предотвратить выход из строя оного. Датчик крепится на аккумулятор магнито или любым другим способом.
В корпус устройства так же встроен вентилятор, который при необходимости включается автоматически. Корпус собран из алюминия и пластика, по бокам установлены радиаторы. Еще прибор содержит индикатор ЖКИ и кнопки управления. Не сложный интерфейс управления устройством, кстати описание на русском присутствует на сайте продавца. Заряжаются аккумуляторы разных типов. Содержатся режимы зарядки, балансировки, разряда, программы совмещающие эти режимы и циклы из этих режимов для восстановления аккумуляторов.
Eще одна простенькая зарядка для начального уровня, бюджетный вариант (точнее чисто балансир).

Аппаратура радио управления (54$):


Обе апы совершенно одинаковые, только наклейки разные. Турнига приобреталась позже, стоит 54 бакса. Eurgle моя первая апа, брал за 80 баксов. Единственное различие в комплектации Eurgle, у нее имеется отсек для батареек пальчиковых, а вот у турниги нету, надо задуматься над покупкой аккумулятора для нее.
Фото апы
   
Обе апы достойны начинающего моделиста. Не большая цена и широкий спектр применения определили популярность данного девайса. Специализированные форумы содержат прошивки под эти приборы значительно улучшающие и без того широкие возможности.
Линк на магазин
Продаются они двух видов, мод1 и мод2, различаются расположением стиков, да же если вы приобрели не тот мод, это легко меняется путем разбора и пере установкой пружинок.
На приемнике чуток ошиблись с надписями наклейки, последних два контакта перепутаны по назначению.
Некоторые тестеры сообщают о дальности в километр, а то и больше, у меня примерно больше 100 метров по прямой терялся сигнал, возможно не повезло с дальностью, хотя в моем случае метров с 20 я перестаю различать ориентацию в пространстве коптера.
Собираем коптер
Итак, все товары приобретены, оплачены и доставлены. На столе лежит куча мала, что же теперь мы будем делать.
Для начала чуток теории, ну и инструменты пока соберем требующиеся для сборки.
Список инструментов:
1) отвертка крестовая (требуется для крепления на стойки плат контроллера и соединительного блока пластиковыми стойками и болтиками, они правда в обзоре еще не участвовали, но со временем добавлю)
2) паяльник не более 40 ватт и желательно не толстое жало, потребуется для спайки разъемов, мам (гнездо) и пап (штекер) на моторах и регуляторах скорости. Надо бы добавить, что разъемы идущие в комплекте с моторами нам не хватит, для полного счастья потребуется еще 8 штук пап.
3) припой и канифоль, припой возьмите с температурой плавления градусов на 90, нам понадобится основательно заливать его в контакты разъемов для хорошего соединения, а большое количество тугоплавкого припоя доставит немало хлопот.
4) ножницы для обрезки стяжек.
Думаю этого набора инструментов для сборки нам будет достаточно.
Продолжаем, сборка с рамы: Распаковываем все причиндалы с пакетиков и собираем раму скручивая болтиками идущими в комплекте ключиком. ВНИМАНИЕ! Не зажимайте болтики сильно, иначе сорвете ключик, не особо он крепкий.
внизу в прорези продеваем сяжку на липучке для крепления аккумулятора
Вот что у нас получится
 
Блок схема квадрокоптера формата Х

Вот, опираясь на эту блок схему мы и будем собирать наш коптер, вы конечно можете выбрать любую другую комбинацию в настройках контроллера, например формата +, но дальнейшее повествование по сборке будет следовать этой схеме.
Обращаю ваше внимание на питание узлов нашего воздушного судна. От аккумулятора запитываются только регуляторы скорости вращения (напряжением не выше 11.1 вольт), на блок схеме они изображены ромбиками в количестве 4 шт. Остальные устройства питаются уже от стабилизаторов этих регуляторов, напряжение на них выравнивается до 5 вольт и стабилизируется. Моторы вращаются в разные стороны тем самым предотвращая раскручивание коптера во время полета. Каждый двигатель имеет свой регулятор скорости, которым в свою очередь управляет контроллер. Приемник (ресивер), подключается к контроллеру передавая управляющие сигналы на него, контроллер обрабатывает их и учитывая данные полученные с датчиков (они расположены на плате контроллера) управляет регуляторами скорости моторов тем самым удерживая коптер в пространстве в стабильном состоянии.
Для начала решим проблему с пайкой, что бы больше не возвращаться к этому горячему процессу. Хорошенько разогреваем паяльник, будьте внимательны, не прожгите чего рядом с собой, так же не забывайте, разогретая канифоль очень долго остывает, не расплавляйте большое количество канифоли, да бы не пролить себе на кожу. Залудите провода на моторах и регуляторах скорости, что бы все жилки на проводах были залиты полностью образуя на кончике провода единый проводок из олова (на регуляторе они и так залужены, но проверьте). Пинцетом (забыл указать его в инструментах) придерживайте штекер или гнездо которое следует припаять к проводам. Залейте в месте спайке гнезда или штекера по больше припоя предварительно добавив канифоли чуток на место спайки. Припаяйте провода к разъемам периодически смачивая жало паяльника канифолью (так лучше будет приставать олово к поверхности пайки). На моторы должны быть припаяны штекера, гнезда припаиваются к регуляторам со стороны трех толстых проводов, эти разъемы будут соединять моторы с регуляторами. Так же штекера припаиваются с противоположной стороны регуляторов, где имеется два толстых провода, а рядом три тонких с маленьким черным гнездом. Эти два провода будут подключаться к блоку сопряжения. После удачной пайки, подождав пока остынут места пайки, проверяем на надежность паяных мест. Теперь одеваем термокембрики на наши разъемы и нагреваем с помощью зажигалки, получится надежная изоляция наших соединений. С паяльными работами закончили.
  
Приступаем к установке моторов на мотормаунты нашей рамы:
В комплекте с рамой идут болтики для крепления моторов. Не следует очень сильно зажимать болтики, рама довольно хрупкая (убедился в процессе использования, будет крошиться), все видео бахвальства со швырянием об стену и топтания по ней, чушь собачья. Но эта хрупкость нам на пользу, мой краш обошелся мне в маленькую сумму, главное не пострадали моторы, а лучи, их легко поменять (приобретите запасной набор рамы), тем более что у нас все на разъемах и легко можно сменить да же в полевых условиях и продолжать наслаждаться полетами.
Ну, вот, моторы на местах, теперь следует определить направление вращения моторов. Как вы уже заметили, на блок схеме моторы вращаются в разных направления. Последовательно устанавливаем направление вращения для каждого мотора, оставляя регуляторы вращения привязанными к каждому мотору после определения направления вращения.
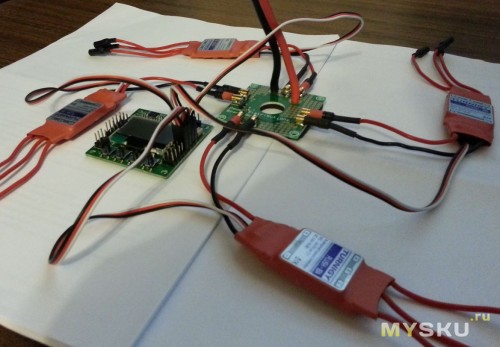
Что требуется проделать? Подключаем к мотору регулятор скорости, регулятор скорости подключаем к блоку сопряжения и к приемнику. К приемнику штекер подключается на третий по счету разъем белым проводом вверх (белый сигнальный, красный положительный, черный отрицательный).
Вот схема подключения (у меня без установки на мотормаунт для наглядности)
 
Устанавливаем стик газа аппаратуры (передатчик, аппа) в крайнее нижнее положение (для моде2 это левый стик), газ убран в ноль. Включаем аппу, подключаем нашу схему к аккумулятору. Следите что бы ничего не касалось мотора, иначе намотает чего нить, моторы довольно сильные. Легонько начинаете подымать стик газа пока мотор не начнет вращаться, если мотор вращается не в том направлении (как указано на блок схеме), отключите питание от нашей схемы и поменяйте любые два провода из трех между мотором и регулятором скорости. Такие вот действия по определению направления вращения проделайте со всеми моторами.
ЗЫ не подключайте пропеллеры во время тестов и настроек, пропеллеры устанавливаются в самую последнюю очередь.
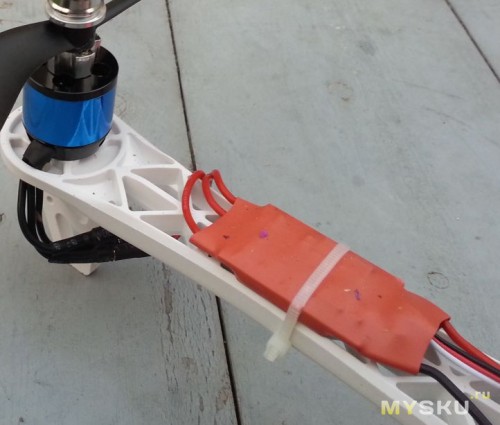
Ну, вот, направления вращения определены, регуляторы подключены к моторам. Стяжками прижмите регуляторы к лучам, не сильно прижимайте, что бы не повредить регули путем деформации.
Что же дальше?
А дальше с помощью пластиковых стоек прикручиваем блок сопряжения к нашей раме. На представленной фото сессии рама отсутствует, что бы вам понятней было, что к чему?
  
Подключаем питающие провода регуляторов скорости к блоку сопряжения. Не перепутайте полярность, черный кабель с разъемом подключаете к черному гнезду на блоке сопряжения. Общий вид вы можете посмотреть на следующих фото.
На двухсторонний скотч или любым другим образом (например как у меня на фото законченной сборки) укрепляем контроллер. Направление полета относительно контроллера будет, назад — со стороны кнопок. У меня белые лучи, это передняя часть коптера, красные соответственно задняя.
Подключаем приемник к контроллеру по порядку, на приемнике слева на права, на контроллере левый ряд, сверху вниз, пять шин с тремя проводами. На приемнике белые провода вверху, на контроллере белые ближе к центру.
В верхней части контроллера находится гнезда для подключения зуммера (маленькая пищалка для индикации событий).
С правой стороны контроллера находятся разъемы для подключения моторов. Сверху вниз по порядку идут разъемы для моторов, возможно подключить до восьми моторов к данному контроллеру, у нашего коптера всего четыре, вот их и подключаем. Провода от регуляторов скорости, сопоставив с блок схемой коптера, подключаем к контроллеру. Белый провод должен находится ближе к центру контроллера.
Ну, вот, наш коптер полностью собран, осталось только настроит параметры контроллера и можно будет взлетать :)
Настройка коптера
Первичная настройка контроллера Ну, вот, конструктор собран, начинаем настраивать контроллер.
Настраиваем стики:

Видим например, что то вроде этого?

Наша задача установить четыре первых параметра в ноль

Вот что должно получится на первых четырех параметрах (должны быть нули)

Устанавливаем канал AUX для управления активацией уровнем: У данного коптера есть два режима управления
1) без акселерометра, только на гироскопах — коптер будет лететь туда куда наклоните его, пока не попытаетесь его выровнять или изменить направление полета
2) режим с участием как гироскопов так и акселерометра — за счет акселерометра коптер будет пытаться выровняется по горизонту, наклонили стик, коптер полетел в сторону наклона, отпустили стик, коптер примет почти горизонтальное положение, в идеале будет висеть на одном месте после отпускания стика.
Для изменения этих двух режимов мы будем использовать вот этот регулятор

для этого выбираем это меню

и устанавливаем верхний параметр вот так

теперь при вращении регулятора по часовой стрелке до конца, будет активен режим авто-горизонта

против часовой стрелки, будут участвовать только датчики гироскопов (такой режим используют в акро моде — крутят разные флипы, в общем для профи)


и устанавливаем два верхних параметра (по дефолту 30) в 60

теперь чувствительность коптера в режиме авто уровня будет достаточна, а в режиме акро будет в норме (ИМХО, хотя я не умею крутить флипы).
Калибровка сенсоров.
для калибровки датчиков установите коптер на ровную горизонтальную поверхность
зайдите в меню

нажимаем продолжить

начнется бегать стрелка и калибровка сенсоров
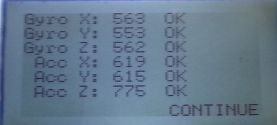
по окончании контроллер отрапартует
заканчиваем калибровку
Калибруем регуляторы скорости
1) отключите питание коптера
2) ВНИМАНИЕ!!! обязательно снимите пропеллеры (они вообще должны быть всегда сняты во время настройки)
3) включите аппу и установите стик газа в крайнее ВЕРХНЕЕ положение
4) нажмите две крайние кнопк на контроллере (не отпускайте кнопки во время калибровки регулей вплоть до отключения питания, иначе калибровка прирвется)
5) подключите аккумулятор к коптеру
6) дождитесь соответствующего сигнала
7) опустите стик газа вноль
8) прозвучит сигнал
9) отключите аккумулятор от коптера
калибровку так же требуется производить при смене моторов или регулей местами
Выбираем ориентацию моторов. Вы можете выбрать любую конфигурацию коптера, но данный обзор расчитан на Х-расположение.
Посмотреть как расположены моторы и в какую сторону должен вращаться каждый мотор можно в меню.


для выбора нашего типа коптера зайдите в меню
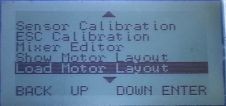
и выберите режим коптера

На этом я заканчиваю обзор, сборку и настройку нашего летающего конструктора. Все, что описано в даном обзоре, сборке, настройке, малая толика, так сказать основа, благодаря которой мой конструктор полетел из коробки, но у вас могут возникнуть определенные трудности, которые вы сможете преодолеть, не пугайтесь их.
Некоторые напутствия от меня:
В основном в моей практике большинство проблем решалось путем хорошей вибро-развязки датчиков контроллера.
Хороших результатов добьетесь путем балансировки моторов, пропеллеров.
Желаю удачи вам в этом увлекательном хобби, по больше удачных конструкций и по меньше падений.
ВНИМАНИЕ!!!
Соблюдайте технику безопасности во время полетов. Не летайте над людьми, животными и машинами.
Старайтесь выбирать полигоны для своих полетов вдали от жилых районов.
Источник: http://mysku.ru/blog/others/8972.html
Просмотров: 4369
|
