Полетные контроллеры
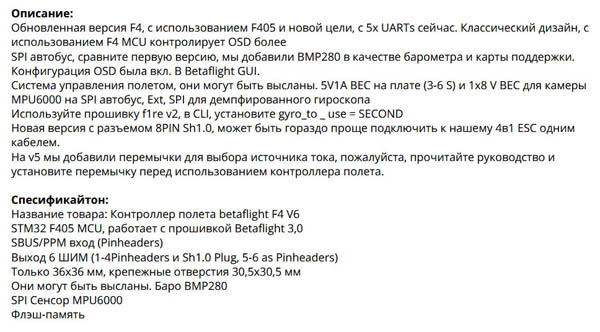
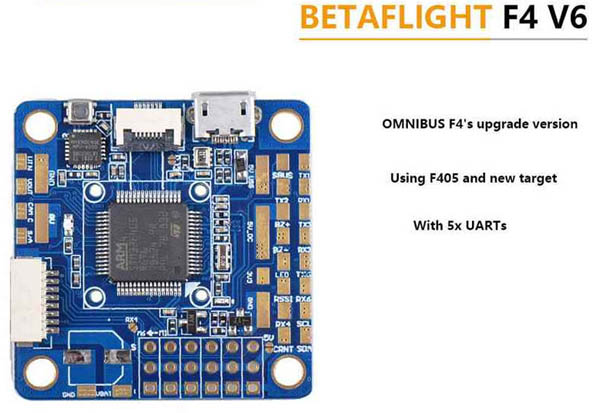
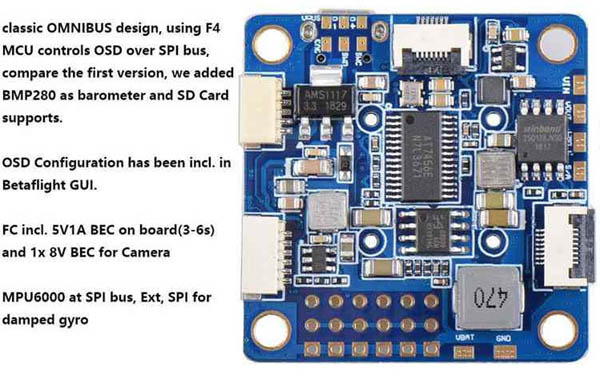
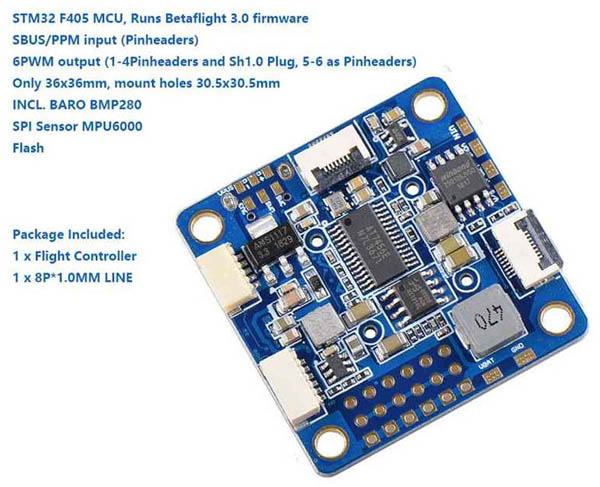
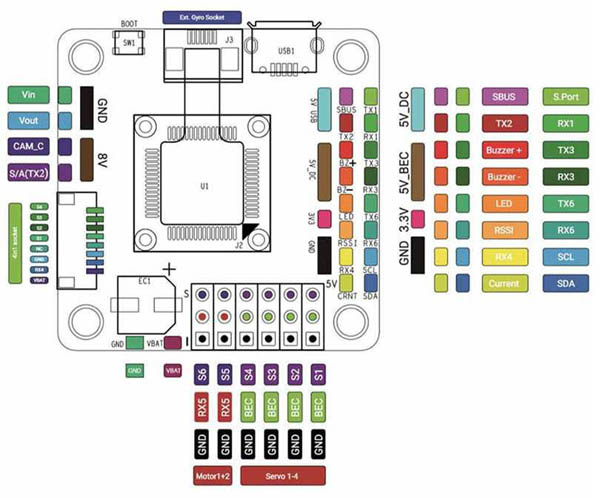
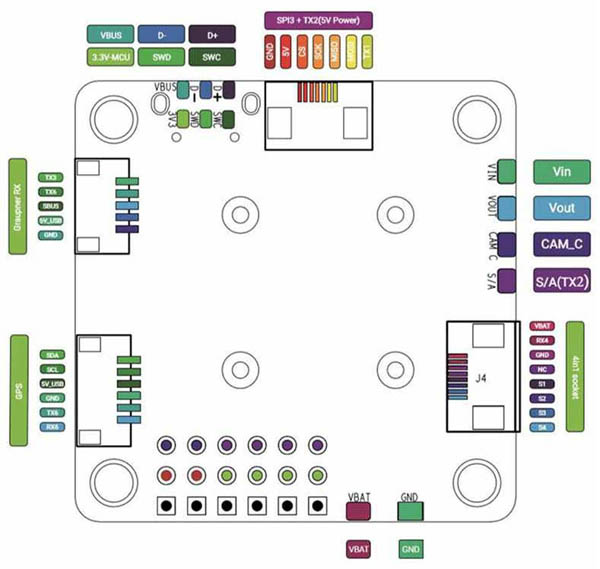
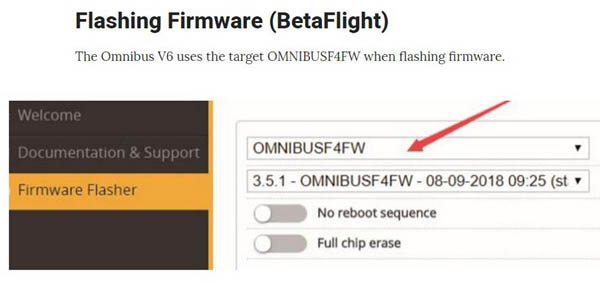
OMNIBUS Betaflight F4 V6
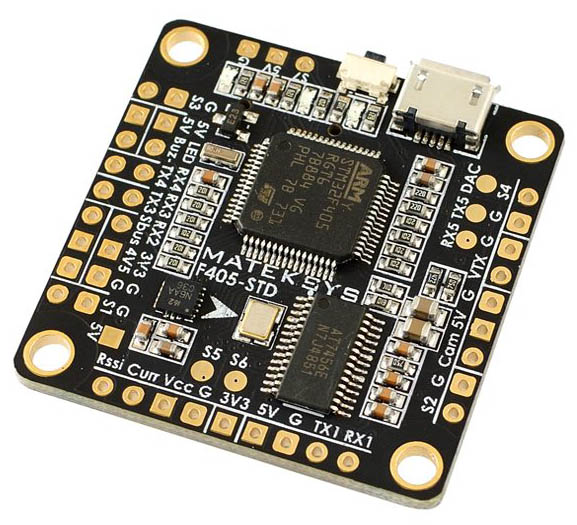
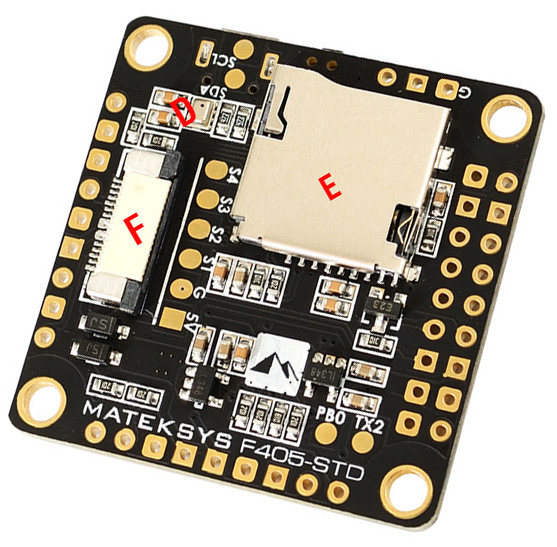
Matek F405-STD
- 168MHz STM32F405RGT6
- 6-Axis ICM20602
- BetaFlight OSD
- B280 Barometer
- MicroSD BlackBox
- VCP & 5xUARTS
- 6x DSHOT outputs
- I2C1 & DAC
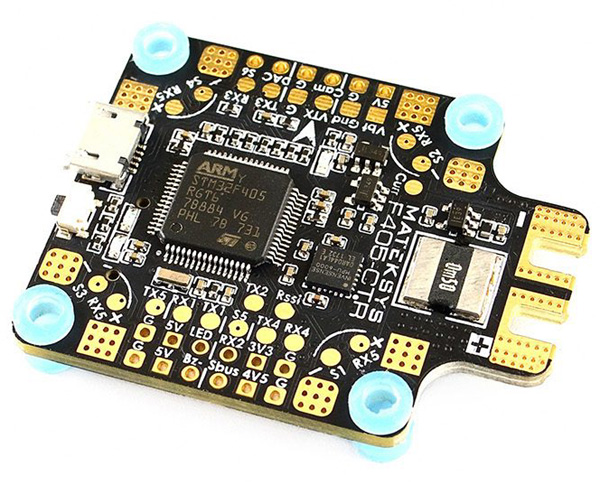
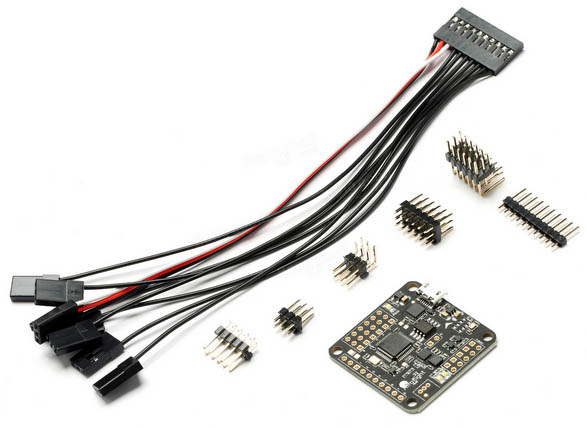
Matek F405-CTR
- 168MHz STM32F405RGT6
- 6-Axis MPU6000
- BetaFlight OSD
- B280 Barometer
- MicroSD BlackBox
- VCP & 5xUARTS
- 6x DSHOT outputs
- I2C1 & DAC
- 6-30v Input voltage
- 184A Current Sensor
- BEC 5V/2A (Max.3A)
Сайт: http://www.mateksys.com/
Особенности:
- Настраиваемые выходы на моторы. Поддерживаются следующие типы: Квадро/Гекса/Три/Би/Y4/Y6/Окто/Стабилизация камеры. (По умолчанию - Х-Квадрокоптер (Quad-X))
- До 8 входных радиоканалов. Поддерживаются стандартные приемники (РРМ), приемники типа PPM Sum (FrSky, например), а также приемники-сателиты Spektrum.
- Встроенный инвертор телеметрии FrSky (совместно с основным портом)
- Контроль напряжения батареи
- Современный 32-битный процессор, запущенный на 3.3В/72МГц (STM32F103CB).
- Бортовой разъем MicroUSB для настройки и конфигурации
- Яркие светодиоды на борту
- Совместимое с MultiWii программное обеспечение для легкой настройки
Характеристики:
- Габариты: 36x36 мм (30.5мм между монтажными отверстиями)
- Вес: 5.3г (с разъемами - 7.3г)
- Датчики: Трёхосевой MEMS гироскоп 2000 град./сек + акселерометр (MPU6050)
- Входное напряжение: 16В (макс.) для входных сигналов и 35В (макс.) для линии контроля напряжения батареи



Модуль для новичков. DJI представляем экономичное решение, контролер полетом Naza -М Lite является упрощенной версией Naza -М, он также надежен и стабилен как Naza –М, в полной комплектации выигрывает другие фирмы по качеству, по цене и по характеристикам. Инновационный дизайн упрощает установку, экономит пространство и вес. Для улучшения производительности внутри установлены демпферы для погашения вибраций от мотора, в систему датчиков вхобят: 3х- осевой гироскоп, 3х- осевой акселерометр, барометр. Naza -М Lite может измерять высоту полета и положение в пространстве, поэтому может управляться как автопилотом, так и ручным управлением.
Подключённый модуль GPS позволит значительно повысить производительность для аэрофотосъемки, с точным удержанием позиции, возврат домой на автопилоте. С модулем GPS, multi-rotor будет держать положение и высоту даже в ветреную погоду. Точность составляет около 2,5м по горизонту и 0,8м по высоте.
Алгоритм стабилизации расширен и хорошо держит не только высокую стабильность полета, но и обеспечивает отличную маневренность. Контроллер очень стабилен, и дает шанс любителям получать незабываемые ощущения при управление.
Особенности:
• Дизайн все-в-одном
• GPS-модуль / Точная позиция Удержание
• Защита от низкого напряжения
• 6 Поддерживаемые типы Multi- роторные
• Расширенный алгоритм стабилизации
• Автопилот
• Есть возможность установки блокировки двигателя (АРМ)
• Встроенная функция, управления стабилизирующим подвесом
• Несколько режимов управления полетами / Автопилот
• Безопасный режим
• Поддержка приёмников Futaba S-Bus и PPM
• Дистанционная Регулировка
В комплекте:
Контроллер - Naza -М Lite
Модуль - DJI GPS/Compass
Светодиодный модуль - DJI V- SEN
USB кабель для прошивки
Все необходимые крепежные детали / соединительные провода
Технические характеристики:
Поддерживаемые конфигурации:
Поддерживает выход ESC : 400 Гц частота обновления
Рекомендуемый Передатчик: PCM или 2.4ГГц 4 канала минимум
Рабочий диапазон напряжения:
Главный контроллер : 4.8V ~ 5.5V ,
Сигнализатор и UBEC Вход: 7.4V ~ 26.0V (2S ~ 6S Lipo)
Потребляемая мощность:
Макс : 1,5Вт (0.3A @ 5V),
Нормальный : 0,6Вт (0,12 A @ 5V)
Рабочая температура: от -10°C ~ 50°C
Размеры:
Главный контроллер : 45.5x31.5x18.5мм
Сигнализатор и UBEC : 32.2x21.1x7.7мм
GPS и компас : 46мм (диаметр) х9мм
Вес:
Главный контроллер : 25г
Сигнализатор и UBEC : 20г
GPS : 21,3г
Производительность :
Точность GPS : По высоте: +/-0.8m , горизонту: +/-2.5м
Макс рыскания Угловая скорость : 200°/s
Макс угол наклона : 45°
Взлёт / посадка : +/-6м/с
Инструкции
Видео с официального сайта
Инструкция на русском языке
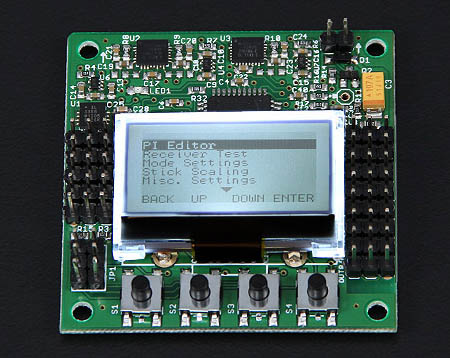
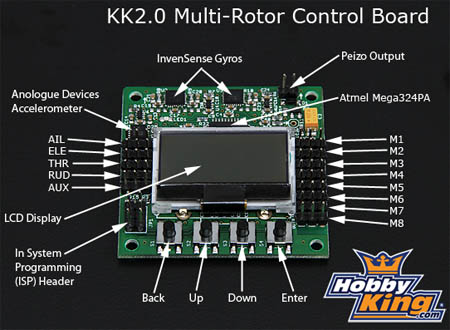
Революционная разработка отцов KK, Rolf R Bakke, исключительно для HobbyKing, платы управления KK2.0, являющейся очередным эволюционный этапом развития первого поколения плат. KK2.0 был полностью разработан с нуля, чтобы предоставить управление мультироторными системами полета для всех, а не только для экспертов. Интегрированный на плате ЖК-экран и встроенное программное обеспечение позволяет проще произвести нужные установки и настройки, чем когда-либо. Множество различных конфигураций мультироторных систем предварительно уже прошито. Просто выберите конфигурацию летательного аппарата, проверьте направление вращения мотора и правильность выбранного винта, откалибруйте ESC и подключите аппаратуру управления, и вы готовы к полёту! Все это можно сделать очень просто следуя подсказкам на экране!
Оригинальна гироскопная система была полностью обновлена, установлены система сверхчувствительного 3-х осевого гироскопа и 3-осевого акселерометра, что позволило сделать наиболее стабильные характеристики управления полета. В основу KK2.0 лёг уже всем известный 8-ми разрядный чип Atmel Mega324PA с 32 Кб памяти. А добавленные 2 канала позволили управлять работой до 8 моторами (октокоптер). Добавлена функция звукового предупреждения при включении и отключении платы.
Если раньше Вы не понимали, как настроить Вашу плату управления или Вы не были уверены в верности её настройки, то KK2.0 просто создана для вас. Простой и удобный интерфейс меню настроек даст возможность быстро и легко произвести необходимые настройки, а стандартный 6 Pin USBasp AVR программный интерфейс, обновить программное обеспечения самой платы.
Технические характеристики:
Размер: 50.5x50.5x12 мм
Вес: 21 гр (Inc Piezo buzzer)
Чип IC: Atmega324 PA
Гироскопы: InvenSense Inc.
Акселерометры: Anologue Devices Inc.
Auto-level: Да
Напряжение питания: 4.8-6.0 В
Интерфейс AVR: стандартное 6 pin.
Сигнал приемника: 1520 us (5 каналов)
Сигнал ESC: 1520 us
Предустановленные в прошивке конфигурации.
Dual коптер
Трикоптер
Гексакоптер конфигурации Y
Квадрокоптер конфигурации "+"
Квадрокоптер конфигурации "х"
Октокопртер конфигурации "+"
Октокопртер конфигурации "х"
X8 +
X8 X
H8
H6
V8
V6
Самолёт 1 канал управления элеронами
Самолёт 2 сервопривода элерона
Летающее крыло
Singlecopter 2 мотора 2 сервопривода
Singlecopter 1 мотор 4 сервопривода
(вариант Свободного Mix через редактор)
Редактор Свободного Mix позволяет устанавливать, куда и какой сигнал получат двигатели со выхода приемника и датчиков. Это позволяет создавать любые конфигурации с возможностью управления работой до 8 моторов или сервоприводов.
Что представляет собой плата управления и как она работает?
Плата HobbyKing KK2.0 управляет полетом летательного аппарата при помощи четырех двигателей. Задача данной платы стабилизировать летательный аппарат во время полета. Для этого плата принимает сигналы от трех гироскопов, расположенных на борту (крена, тангажа и рысканья), а затем передает сигналы для обработки процессору Atmega324PA IC. Процессор Atmega324PA IC обрабатывает поступающие сигналы, в соответствии с установленным пользователем программным обеспечением и передает управляющие сигналы ESC-контроллерам двигателей для управления скоростью вращения двигателей и как следствие стабилизации вашего летательного аппарата.
Плата HobbyKing KK2.0 управления так же принимает сигналы, поступающие от вашего приемника и через согласующие элементы передает эти сигналы для обработки процессору Atmega324PA IC. После их обработки процессор Atmega324PA IC посылает сигналы ESC-контроллерам двигателей для установки скорости вращения, что ведет к изменения направления движения летательного аппарата (вверх, вниз, назад, вперед, влево, вправо, рыскания).

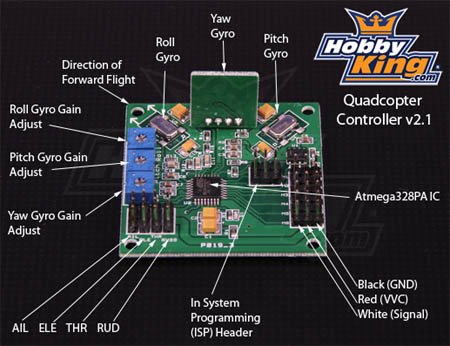
Представляем Вашему вниманию новую версию контроллера управления мультикоптера v.2. Контроллер собран на основе популярной и хорошо поддерживаемой платы управления версии КК компании Hobbyking.
На плате управления HobbyKing мультикоптера используются пьезо-гироскопы производства японской компании Murata, менее чувствительных к вибрации, чем гироскопы SMD-типа от компании STMicroelectronics. На плате управления установлен чип Atmega168PA IC программируемый пользователем.
Технические характеристики.
Размеры платы: 50.5x50.5x23.5 мм
Вес: 14.5 гр
Чип: Atmega168PA
Гироскопы: Murata Piezo
Входное напряжение: 3.3-5.5В
Сигнал приемника: 1520us (4 канала)
Сигнал ESC-контроллера: 1520us (4шт. ESC)
Что представляет собой плата управления и как она работает?
Плата управления HobbyKing Multi-rotor управляет полетом летательного аппарата при помощи четырех двигателей. Задача данной платы стабилизировать летательный аппарат во время полета. Для этого плата принимает сигналы от трех гироскопов, расположенных на борту (крена, тангажа и рысканья), а затем передает сигналы для обработки процессору Atmega168PA IC. Процессор Atmega168PA IC обрабатывает поступающие сигналы, в соответствии с установленным пользователем программным обеспечением и передает управляющие сигналы ESC-контроллерам двигателей для управления скоростью вращения двигателей и как следствие стабилизации вашего летательного аппарата.
Плата управления HobbyKing Multi-rotor так же принимает сигналы, поступающие от вашего приемника и через согласующие элементы передает эти сигналы для обработки процессору Atmega168PA IC. После их обработки процессор Atmega168PA IC посылает сигналы ESC-контроллерам двигателей для установки скорости вращения, что ведет к изменения направления движения летательного аппарата (вверх, вниз, назад, вперед, влево, вправо, рыскания).
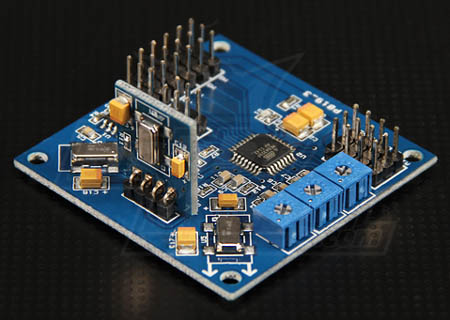
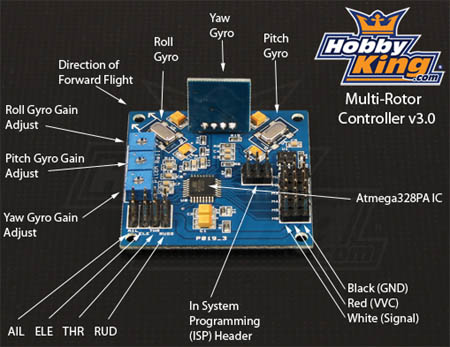
Представляем Вашему вниманию обновленную версию контроллера управления квадрокоптера v.3. Контроллер собран на основе популярной и хорошо поддерживаемой платы управления версии КК компании Hobbyking.
На плате управления HobbyKing Quadcopter используются пьезо-гироскопы производства японской компании Murata, менее чувствительным к вибрации, чем гироскопы SMD-типа от компании STMicroelectronics. На плате управления установлен чип Atmega328PA IC программируемый пользователем.
Технические характеристики:
Размеры платы: 50.5x50.5x23.5 мм
Вес: 14.5 гр
Чип: Atmega328PA
Гироскопы: Murata Piezo
Входное напряжение: 3.3-5.5В
Сигнал приемника: 1520us (4 канала)
Сигнал ESC-контроллера: 1520us (4шт. ESC)
Что представляет собой плата управления и как она работает?
Плата управления HobbyKing Quadcopter управляет полетом летательного аппарата при помощи четырех двигателей. Задача данной платы стабилизировать летательный аппарат во время полета. Для этого плата принимает сигналы от трех гироскопов, расположенных на борту (крена, тангажа и рысканья), а затем передает сигналы для обработки процессору Atmega328PA IC. Процессор Atmega328PA IC обрабатывает поступающие сигналы, в соответствии с установленным пользователем программным обеспечением и передает управляющие сигналы ESC-контроллерам двигателей для управления скоростью вращения двигателей и как следствие стабилизации вашего летательного аппарата.
Плата управления HobbyKing Quadcopter так же принимает сигналы, поступающие от вашего приемника и через согласующие элементы передает эти сигналы для обработки процессору Atmega328PA IC. После их обработки процессор Atmega328PA IC посылает сигналы ESC-контроллерам двигателей для установки скорости вращения, что ведет к изменения направления движения летательного аппарата (вверх, вниз, назад, вперед, влево, вправо, рыскания).
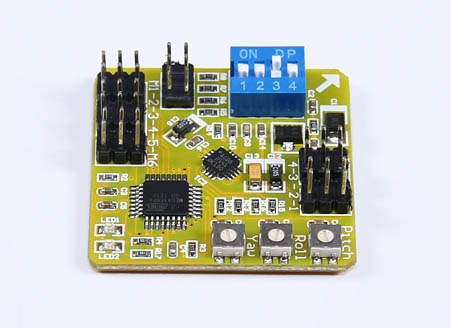
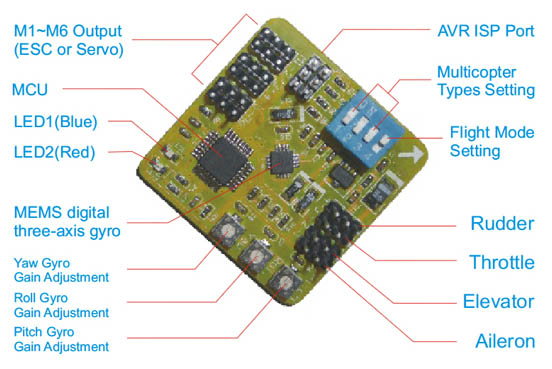
Плата управления полета базируется на уже известном микроконтроллере Atmel Mega168PA, с использованием 3-х осевого MEMS гироскопа. Она способна управлять до 8-ми различных типов мультироторными системами и имеет два полетных режима без необходимости перепрошивки. С помощью простой системы выбора конфигураций (swith1-3), Вы можете легко и быстро настроить плату управления на нужную конфигурацию и выбрать тип полётного режима (swith 4).
Малый вес и компактность позволит установить контроллер в небольшой летательный аппарат при помощи двухстороннего скотча или ленты липучки.
Конфигурации Hobbyking i86 Multi-Rotor Control Board
Самолет
Dual коптер
Трикоптер
Квадрокоптер конфигурации "+"
Квадрокоптер конфигурации "х"
Гексакоптер конфигурации ж
Гексакоптер конфигурации H
Гексакоптер конфигурации Y
К указанным конфигурациям можно выбрать два полетных режима "Normal" и "Sport" (по умолчанию "Normal").
Характеристики:
Входное напряжение: 4-6 В
Входной сигнал PPM: 50 Гц (стандарт)
Частота PWM: 400 Гц для ESC, 50 Гц для сервоприводов
Чувствительность гироскопа: +/- 500 град/сек,
ODR: 800 Гц
Диапазон рабочих температур: от -40°С до 85°С
Размер: 40х40 мм
Вес: 8 гр

Контроллер FY-90 был разработан специально, для управления полетом квадрокоптера.
Система стабилизации положения в полете (Attitude flight stabilization system (AFSS)) - это сердце контролллера FY-90Q, в которой встроены три гироскопа по трем осям и три акселерометра, так же работающие по трем осям. AFSS представляет собой навигационную платформу, полностью основанную на инерционных данных. которая вычисляет положение в пространстве (3D). используя алгоритмы преобразования сигналов и технологии фирмы FeiYu Tech.
Когда система находится в режиме максимального баланса она фиксирует любые изменения положения модели в пространстве. Если будет зафиксировано изменение положения, гаджет отправит сигнал на изменение скорости вращения мотора квадрокоптера, для его стабилизации в пространстве.
Контроллер FY-90Q имеет два режима управления полетом.
Режим 1: Режим максимального баланса, в этом режиме полет квадрокоптера полностью стабилизирован в трех плоскостях из-за чего, положение в пространстве становится максимально стабильным. Такой режим как нельзя кстати, подходит для аэрофотосъемки, видеосъемки. полетов FPV или для начинающих пилотов.
Режим 2: Пилотажный режим,в этом режиме, моторы квадрокоптера резко и четко отзываются на управляющие сигналы. Данный режим предназначен для опытных пилотов, желающих получить высокую скорость передвижения модели и более четкое управление.
Инструкция
Спецификация:.
Питание: 4в~6в DC
Ток: 52мA (при 5в)
Размеры: 55 x 33 20мм
Вес: 20гр.
Скорость поворота: <500 град/сек




Multiwii SE V2.0 это контроллер мультикоптера с базовой инерциально-навигационной системой, который может быть запрограммирован соответственно вашим требованиям. С расширенными возможностями и возможностью полного программирования, это устройство может контролировать любой тип самолета. Это идеальный контроллер полета для ваших многороторных авиамоделей.
Особенности:
• Маленькие размеры (размеры между крепежными отверстиями 35x35мм)
• 6-канальный вход для стандартных приемников и вход для приема общего PPM сигнала
• Восьмиканальный выход для управления моторами
• 2 сервовыхода для управления карданного подвеса камеры
• Можно использовать сервовыход для нажатия кнопки камеры
• FTDI/UART TTL разъем для отладки, программирования или подключения LCD дисплея
• I2C разъем для дополнительных датчиков, I2C LCD/OLED дисплея или навигационной системы CRIUS I2c-GPS
• Раздельное стабилизированное питание 3.3В и 5В LDO1 стабилизатор
• ATMega 328P микроконтроллер
• MPU6050 6 осевой гироскоп/акселерометр с обработкой Motion Processing Unit
• HMC5883L трехосевой цифровой магнетометр
• BMP085 цифровой барометр
• Бортовой конвертер логических уровней
Полетные режимы
Поддерживаемые базовые режимы
- Классический (3Д) / Acro
- Стабилизация горизонта / Level
- Стабилизация высоты /Alt Hold
- Режим удержания курса / Head Lock
Расширеные режимы
- Режим демпфирования / HeadFree (CareFree)
- Удержание координат по GPS (Нужен GPS приемник + I2C-GPS навигационный модуль)
- Возвращение на стартовую позицию по GPS (Нужен GPS приемник + I2C-GPS навигационный модуль)
Характеристики:
Размеры: 40x12x40мм
Вес: 9.6г
Расстояние между крепежными отверстиями: 35мм (может быть изменено до 45мм для навигационного модуля CRIUS)
Диаметр отверстий: 3мм
MultiWii 328P представляет собой контроллер мультикоптера с базовой инерциально-навигационной системой, который может быть запрограммирован соответственно вашим требованиям. Эта версия MultiWii контроллера имеет поддержку сателитных приемников DSM2*. С расширенными возможностями и возможностью полного программирования, это устройство может контролировать любой тип самолета. Это идеальный контроллер полета для ваших многороторных авиамоделей.
* DSM2 - протокол связи между приемником и передатчиком 2.4ГГц, отличающийся высокой надежностью.
Особенности:
• SMD дизайн на основе контроллера Atmega328P
• ITG3205 Трехосевой гироскоп
• BMA180 Акселерометр
• BMP085 Барометр
• HMC5883L Магнетометр
• Выход для сервомашинок управления поворотом камеры
• Раздельное стабилизированное питание 3.3В для датчиков
• Бортовой конвертер логических уровней
Характеристики:
Размеры: 50x50x12mm
Монтаж: Стандартный стиль МК монтажных отверстий 45мм х 45мм
Вес: 13.9г
Описание модуля
Описание разъемов

FY-901 - это инерционный контроллер-стабилизатор для мультироторных систем. Обладая 3-осевым гироскопом и 3-осевым акселерометром, он обеспечивает максимально возможную стабилизацию полета.
FY-901 имеет 2 режима стабилизации, которые могут быть выбраны с помошью передатчика:
Режим автоматической стабилизации: в этом режиме, при помощи акселерометра, контроллер обеспечивает неподвижное зависание, когда стики газа находятся в нейтральном положении. Прекрасно подходит для съемок видеокамерой!
Стандартный режим/3D режим: в этом режиме используется гироскоп, выравнивающий коптер в горизонтальной плоскости, но нет зависания на любой высоте, что позволяет выполнять различные маневры моделью. Прекрасно подходит для спортивного/3D режима управления!
Контроллер снабжен входами для подключения 4-х ESC. Помимо поддержки квадрокоптера, контроллер может управлять полетом и Y3-коптера (конфигурация "скорпион"). Гироскопы можно настроить снаружи корпуса, что облегчит подготовку коптера к полету.
Особенности:
• Простота монтажа
• 3-осевой гироскоп + 3-осевой акселерометр
• Стабилизация полета с фиксированным зависанием
• 2 основных режима полета с возможностью выбора через передатчик
• Простота и удобство расположения настроечного интерфейса
Инструкция
Характеристики:
Рабочее напряжение: 5~6V
Стабилизаторы: 3-осевой гироскоп, 3-осевой акселерометр
Режимы полета: 2, выбираемые через передатчик
Размеры: 47x27x16мм
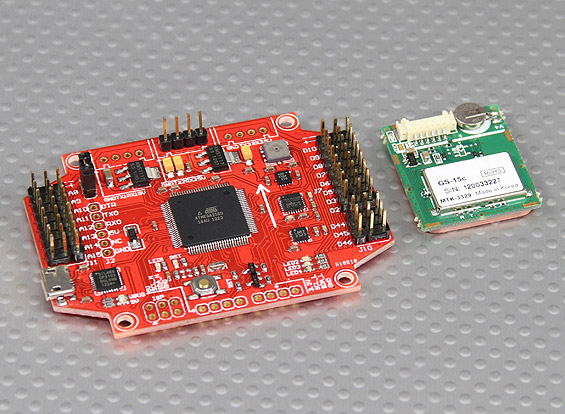
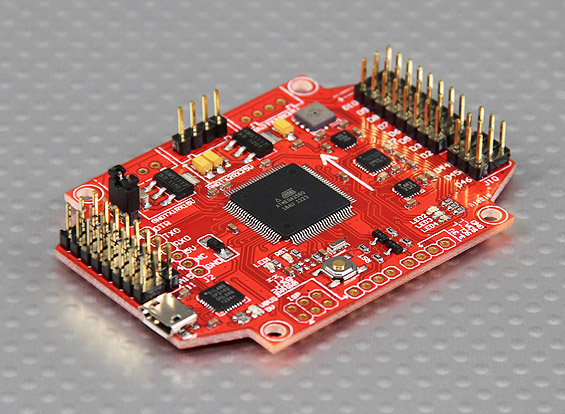
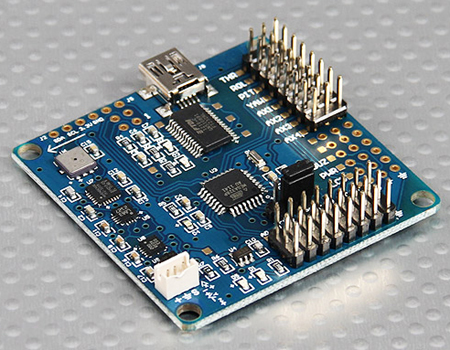
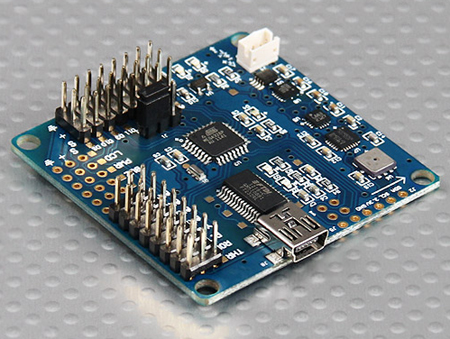
MultiWii PRO представляет собой контроллер мультикоптера с базовой инерциально-навигационной системой, который может быть запрограммирован соответственно вашим требованиям. Эта версия MultiWii поддерживает прямое подключение GPS модуля MTK 3329 (входит в комплект) за счет чего обладает очень точным позиционированием. С расширенными возможностями и возможностью полного программирования, это устройство может контролировать любой тип летательного аппарата. Это идеальный контроллер полета для ваших мультикоптеров с любым количеством роторов.
Особенности:
(MultiWii PRO)
• SMD дизайн на основе контроллера Atmega2560
• ITG3205 Трехосевой гироскоп
• BMA180 Акселерометр
• BMP085 Барометр
• HMC5883L Магнетометр
• Выход для сервомашинок управления поворотом камеры
• Поддержка прямого подключения GPS модуля (MTK 3329 GPS модуль в комплекте)
• Раздельное стабилизированное питание 3.3В для датчиков
• USB разъем для программирования
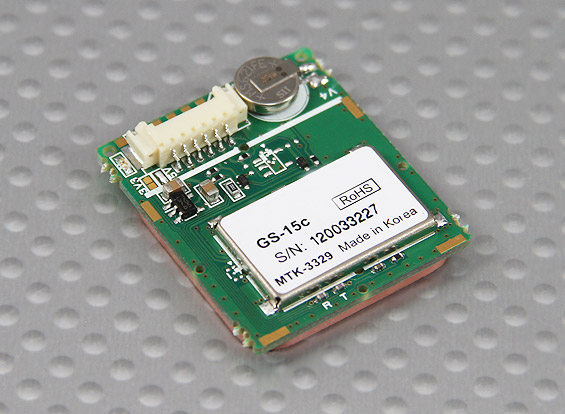
(Модуль GPS MTK 3329 )
• Основан на архитектуре MediaTek Single
• Частота L1, C/A код, 66 каналов
• Высокая чуствительность -165dBm при отслеживании координат, обеспечивая отличную работу в условиях города
• поддержка DGPS (WAAS, EGNOS, MSAS) (настраивается в прошивке)
• USB/UART интерфейс
• Поддерживает функцию AGPS (Автономный режим: EPO* действителен 14 дней)
*EPO - Extended Prediction Orbit - расширенный прогноз орбит спутников
Характеристики:
(MultiWii PRO)
Монтаж: Стандартный стиль МК монтажных отверстий 45мм х 45мм
Размеры: 70x50x12мм
Вес: 16г
(Модуль GPS MTK 3329 )
Точность позиционирования: < 3м >CEP (50%) без SA* (горизонтальная)
Холодный Старт: до 35 секунд (Типичное значение)
Теплый Старт:до 34 секунд(Типичное значение)
Горячий Старт: до 1 секунды(Типичное значение)
Энергопотребление: 48мA (инициализация), 37мA (отслеживание координат)
Энергопотребление в спящем режиме: 15мкA, (Типичное значение)
Размеры: 30x26x7мм
Вес: 8г
Вес: 26г
Инструкция по подключению GPS
Описание разъемов модуля
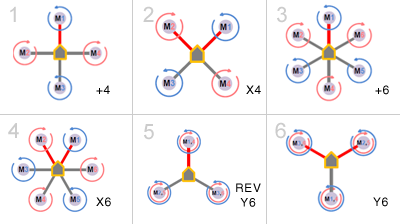
Схемы расположения двигателей
Управление модулем стиками
Настройка GPS
Источник: http://www.parkflyer.ru
Просмотров: 27628
|