Создать квадрокоптер как платформу для летающего робота я планирую уже очень давно. Первые расчеты и заказ деталей я сделал год еще назад. Однако, делать «просто коптер» чтобы полетать, управляя с пультом или даже в FPV режиме конечной задачей не является. Поэтому коптер должен быть максимально гибким и как можно менее дорогим.
По отдельности все детали для коптера есть, но их сопряжение — дело простое только в теории. Нужно быть и программистом и инженером и моделистом — вертолетчиком. Поэтому процесс движется довольно небыстро. А летать хочется :) Ничто так не расхолаживает и не демотивирует как отсутствие видимых результатов, особенно когда прогресс-то вроде есть, но не наглядный. Да и экспериментировать сразу на большом квадракоптере дорого и опасно.
Поэтому я решил собрать для экспериментов миникоптер. Как всегда — задача сделать недорого, просто и гибко.
Мой результат — готовый коптер за 1 день (на сборку и запуск) и $120 (стоимость квадрокоптера включая доставку). А с аппаратурой — $145.
Кому как, а для меня основной преградой в коптеростроении всегда была дороговизна проверенных наборов деталей (kit), которые можно купить в одном месте и поэкспериментировать. Ведь собрав коптер, просто так летать надоест очень быстро, если, конечно, вы не авиамоделист, для которого это лишь еще одна забавная моделька. Самое интересное — добавить коптеру немного (или много, зависит от умений и изобретательности) самостоятельности. Но пока поднимешь коптер в воздух потратишь столько сил, что на самое интересное запал уже начинает угасать. Да и пока отладишь программу управления — разоришься, ведь каждая ошибка — это почти наверняка падение, а самое дешевое падение — это сломанные пропеллеры.
Сейчас покажу, как это преодолеть.
На самом деле основной бюджет коптера еще меньше, всего около $100 включая доставку.
Итак, обязательные запчасти:
Вот и весь джентльменский набор.
Но нам понадобится и кое-что дополнительно. Возможно, у вас что-то из этого имеется, поэтому заказывайте то, чего не хватает:
Собирается весь квадрокоптер за 1 выходной. На самом деле даже быстрее. Я потратил около 6 часов в сумме, работая не торопясь.
Сначала собираем раму. Приходит она вот в таком виде (мелкие детали на фото отсутствуют, они в пакете)
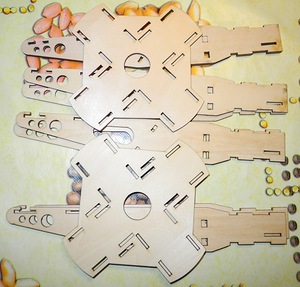
Боковинки каждого луча склеиваем с помощью ПВА-М или суперклея (ПВА-М дает прочные эластичные швы, но собирать раму лучше вечерком, чтобы до утра оставить клей высохнуть как следует). Собираем все лучи и приклеиваем к нижней центральной пластине. Верхнюю пока отложите в сторону. Ножки лучей склеиваются из двух одинаковых половинок. Поскольку в луче всего 5 деталей (2 стенки и три распорки :), думаю, что сложности в сборке не составит.
Откладываем раму сохнуть до утра. А с утра достаем паяльник, термоусадку, провода и садимся паять.
Сначала продеваем провода всех 4х ESC в лучи вот таким макаром:

Затем берем толстый провод, отрезаем по 2 куска красного и черного цветов длиной сантиметров по 5-7. Зачищаем с концов по 5 мм и в середине примерно 5-7 мм. Куски спаиваем зачищенными серединами крест-накрест. Получится два креста — черного и красного цветов. Концы пока просто залудить.
Затем к красному перекрестию припаиваем красные концы от всех четырех ESC, не забыв надеть кусочки термоусадочной трубки по 1.5-2 см. То же самое проделываем с черной крестовиной. Размещаем все это в центре квадрокоптера.
Отрезаем еще по 1 куску толстого провода и припаиваем их к перекрестьям, концы выводим в отверстие в днище коптера, а место спайки изолируем:

Проверьте все внимательно, чтобы не было непропаев и коротких замыканий. Припоя не жалейте, токи тут очень серьезные текут, поэтому площадь контакта нужна побольше.
Если все в порядке, можно смазать ПВА-М верхнюю крестовину коптера и приклеить ее, спрятав таким образом все силовые провода внутри. На хвостик из просунутых в отверстие днища проводов надеваем термоусадку и припаиваем коннектор XT60 в соответствии с обозначенной на нем полярностью (красный провод к +).
Теперь крепим моторы к раме парой винтов М3х10, подложив с обратной стороны шайбу. Просовывем в отверстие в раме провода от мотора, припаиваем их к ESC. Перед пайкой наденьте термоусадочные кембрики, но пока не усаживайте их, после проверки может понадобиться сменить направление вращения мотора, для этого нужно поменять местами любые два провода.
Выглядит в готовом виде это примерно так:

Ну вот, теперь можно проверить и настроить ESC и моторы.
Не надевая пропеллеры, подключаем к ресиверу в 3й канал — это Throttle в стандартной 4х канальной схеме (или серво-тестеру, если имеется), затем включаем передатчик (предварительно нужно связать их- bind, эта операция описана в инструкции). Подключаем аккумулятор к коннектору XT60. После писка от ESC плавно даем газ и проверяем, что мотор с ESC в порядке.
Повторяем процедуру для остальных моторов. Я бы заодно порекомендовал настроить тип батареи и скалибровать газ, но это можно и потом.
Проверяя моторы, обратите внимание на направление вращения. Нам нужно, чтобы два мотора напротив друг друга вращались в одну сторону, а соседние — в разные:

Поменять направление вращения мотора, напоминаю, можно поменяв местами любые 2 из трех проводов, которые идут к ESC. Можно сразу пронумеровать моторы по схеме соответственно направлению вращения и подписать карандашом на лучах.
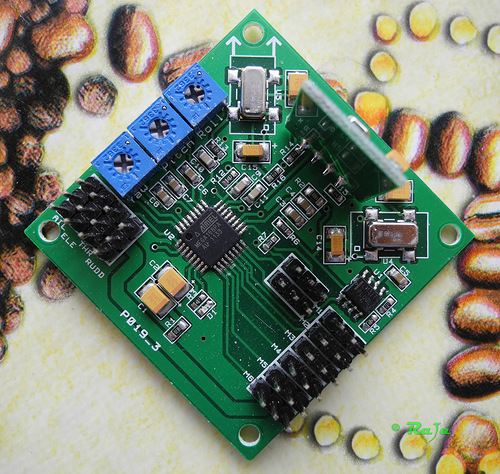
Все вращается правильно и реагирует на ручку газа передатчика правильно? Замечательно, переходим к плате управления.
Она поставляется в мягком корпусе из пеноматериала. аккуратно ее извлекаем, переворачиваем и вставляем обратно, а мягкий корпус на двусторонний скотч или клей крепим на раму так, как указано на картинке выше, чтобы стрелка смотрела между лучами, на которых установленым моторы 1 и 2.
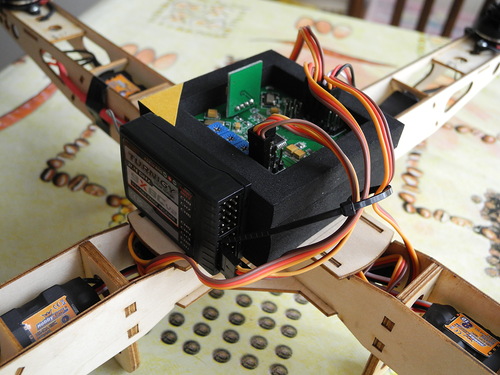
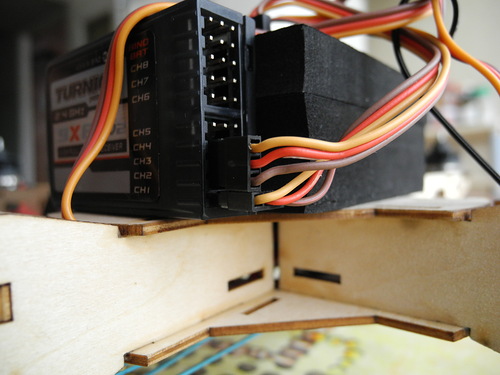
Сбоку к нему клеим на двусторонний скотч ресивер радиоаппаратуры (антенну крепим к одному из лучей):
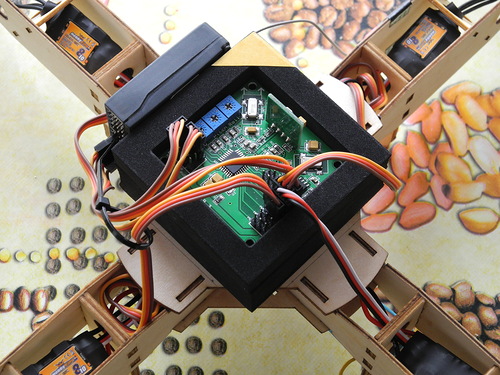
Я наклеил стрелку на корпус, чтобы было легче ориентироваться на земле где у коптера перед.
Теперь подключаем мозги — скорее всего 2-3 из 4 ESC не достанут до платы управления, тут то и пригодятся servo extension кабели. Но их можно сделать самим. Нужна 3пиновая вилка из обычный PLS гребенки с шагом 2.54 ммм и половинка кабеля для соединения ресивера и платы управления (нам нужен Female коннектор).
Подключаем моторы соответственно нумерации в разъемы M1-М4
Сигнальный провод к центру платы, землю к краю (на предыдущей фото все видно).
Теперь подключаем ресивер. По умолчанию 4-х канальная настройка такая:
1 — Aileron (элероны, ROLL)
2 — Elevator (тангаж, PITCH)
3 — Throttle (газ)
4 — Rudder (руль направления, рыскание, YAW)
Вот и подключаем по порядку каналы к плате, на ней подписано соответственно AIL, ELE, THR, RUDD.
Только не 4 проводами, а проще: первый подключаем как положено — черный провод (земля) к краю платы, сигнальный внутрь, а остальные три канала подключаем одним проводом, нас интересует только сигнальный провод:
Все, осталось прикрепить батарею и коптер собран. Тут и настал черед резинки :)
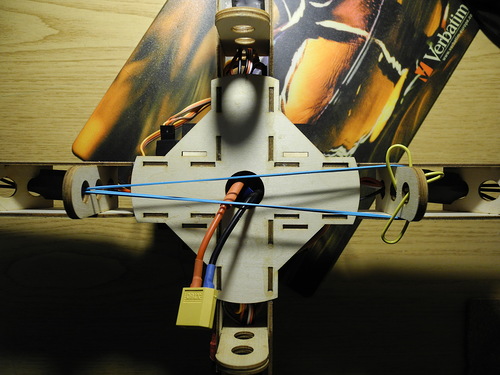
Батарею при взвешивании просто положил сверху.

Осталось прошить плату управления и настроить коптер.
Для прошивки используем AVR ISP программатор. Подключение такое:
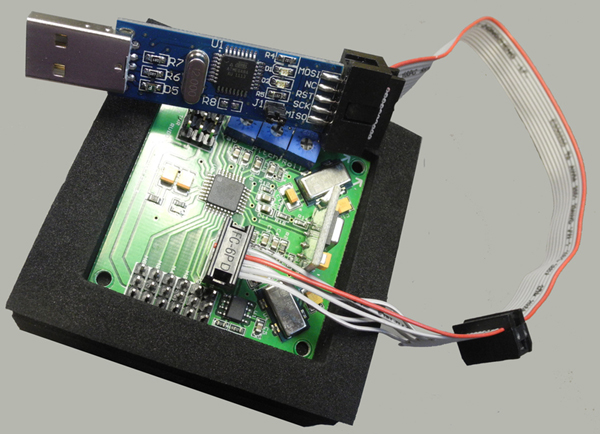
Т.к. плата является клоном Kaptein Kuk quadrokopter, можно воспользоваться их
софтинкой (KKmulticopter Flash) для прошивки.
У меня стабильно заработала прошивка
XXcontrol_KR_XCopter v2.5. Ее можно прошить с помощью avrdude:
avrdude -c usbasp -p m168p -U flash:w:XXcontrol_KR_XCopter_v2_5.hex:a
или выбрать в программульке для прошивки, она скачает сама.
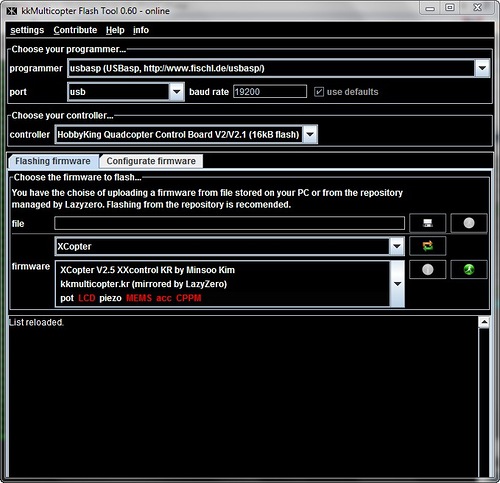
v4.7 от Kaptein Kuk у меня заработала некорректно, поэтому не советую ее.

Отключаем от программатора, выполняем настройку по
инструкции (пункты 1, 2, 4 и 8, остальное по желанию).
Все, полетели :)
Взлетать советую медленно и очень осторожно. Сначала поставьте коптер стрелкой от себя, нужно попробовать приподнять коптер газом, если наклоняется или вращается, триммируем его, чтобы он взлетал без перекоса (попробуйте покачать аккуратно стиками элеронов и тангажа, буквально касаясь их, пока он еще на земле, чтобы убедиться, что все каналы работают правильно, если нет, инвертируйте нужные, у меня это был канал Elevator). Затем если он покачивается стиками правильно, чуть-чуть добавьте газа, чтобы взлетел на пару сантиметров, и опускайте обратно. Ну и дальше учимся летать :) (Я пока определил что к чему, сломал 2 пропеллера об стену — глюк прошивки v4.7, а потом еще в процессе настройки коэффициентов усиления гироскопов сломал еще пару — коптер раскачивался и задел диван, дома тесно, поэтому дома больше не летаю). Если не уверены или страшно — наденьте защитные очки и оденьтесь, пропеллеры бьют ощутимо, мне не попадало по рукам, но они острые и вращаются очень быстро!
Как освоите эту платформу, можно ставить свой контроллер или писать свою прошивку, добавлять акселерометры, барометр, компас, сонар, GPS, телеметрию, LPS лазер и делать из платформы робота. Но сначала получаем удовольствие, от винта, мы взлетели!
Удачных вам полетов!

