54 вопроса по настройке контроллера NAZA

Размеры контроллера: 45мм×31мм×19мм
Диаметр GPS: 46мм, толщина: 9мм
NAZA-M LITE SOFT - скачать
DJI_Driver_Installer - скачать
DJI_WIN8_Driver_Installer - скачать
При установке, настройке и тестировании строго рекомендуется снять пропеллеры с моторов чтобы избежать травм и поломок!!!
1. Что за функция зашиты приемника в прошивке 2.12 ?
Работает в АТТ и ГПС режимах. Если включить, то при отсутствии команд с передатчика около 20 секунд Наза зависнет в точке. Если в течение последующих 10 секунд команд поступать не будет — Наза начнет процедуру возврата в точку взлета. Такой себе ФейлСейф для тех приемников которые его не имеют или он не на канале 5.
2. Высоту возврата домой (RH) можно настроить?
Нет. Возврат на Точку взлета осуществляется на высоте 20 метров.
3. В чем отличие режимов FailSafe (ФейлСейфа)?
Режимы ФейлСейфа включают в себя Зависание + Посадка (Landing) и Возврат Домой + Посадка (Go-home and Landing). Выберите один из методов, при котором полетный контроллер при потере сигнала от передатчика будет выполнять процедуру ФейлСейфа (Fail-Safe).
Зависание + Посадка (Landing): при разрыве связи с передатчиком коптер зависнет в том месте и на той высоте, в котором находился на момент разрыва связи и подождав возможного появления сигнала 15 секунд произведет посадку. Если разрыв связи произошел в полете, коптер вернется назад на некоторое расстояние, в точку и на высоту в которой произошел разрыв связи.
Возврат Домой + Посадка Go-H (Go-home and Landing):
Если высота полета больше исходной высоты +20 м= возврат происходит на текущей высоте.
Если высота полета меньше или равна исходной высоте +20 м= возврат происходит на исходной высоте +20 м.
Исходная высота это высота Точки Взлета (позиция и высота подключения аккумулятора).
4. Как работает режим КурсЛок?
Использование Режима КурсЛока (Course Lock).
ШАГ 1: Настройка: Включите ИКО (IOC) и настройте тумблер на передатчике на канал Х2.
ШАГ 2: Запись направления «Вперед» может осуществляться двумя способами: Вручную и Автоматически.
а) Автоматическая запись: перед взлетом, полетный контроллер записывает текущее положение носа коптера как направление «Вперед» на 30-ой секунде после подачи питания. Светодиод состояния LED моргнет, указывая на успешную запись.
б) Ручная запись: быстро переключите тумблер канала Х2 от 3-х до 5-ти раз из положения Выкл (OFF) в положение КурсЛок (Course Lock) для записи текущего положения носа коптера как новое направление «Вперед» во время полета. Светодиод состояния LED моргнет, указывая на успешную запись.
ШАГ 3: Включение режима КурсЛок: После успешной записи направления «Вперед», если полетный контроллер находится в режиме Удержания (Atti) или Удержания GPS (GPS Atti) Вы можете переключить канал Х2 в положение КурсЛок для включения режима. В этом режиме, куда бы не был направлен нос коптера, реальное направление полета будет соответствовать записанному направлению «Вперед», и светодиод LED будет медленно моргать индицируя включенный режим ИКО (IOC) в полетном контроллере.
ШАГ 4: Выключение режима КурсЛок, тут возможно два пути:
а) Переключите канал Х2 в положение Выкл (OFF) для выхода из режима КурсЛок. Это рекомендуемый способ выхода из режима.
б) Переключите канал Режимов U в положение Ручное (Manual), или выключите передатчик, или продолжайте полет в режиме Полета По Точкам.
ШАГ 5: Повторное включение режима КурсЛок (Course Lock): Если Вам необходимо снова включить режим КурсЛок (Course Lock), вначале переключите тумблер канала Х2 в положение Выкл (OFF), затем переключите канал Режимов (U) в положение Удержания (Atti) или Удержания GPS (GPS Atti) и только после этого переключите канал Х2 в положение КурсЛок (Course Lock) для включения этого режима.
5. Как работает режим ХоумЛок?
Обратите внимание на то, что режим активируется на расстоянии более10 метров от Точки Взлета, и при возврате к Точке Взлета и достижении коптером зоны 10 метров этот режим выключится автоматически!
Использование Режима ХоумЛок (HomeLock):
ШАГ 1: Настройка: Включите ИКО (IOC) и настройте тумблер в передатчике на канал Х2.
ШАГ 2: Запишите положение Дом (Home): Именно эту точку коптер будет использовать как опорную точку при приеме команд от пилота, к ней и от нее он будет лететь при наклонах стика Тангажа (Pitch). Обратите внимание, что эта же точка будет использоваться как Точка Взлета в режиме Расширенного ФейлСейфа (Enhanced Fail-Safe). Запись положения Дом (Home) может осуществляться двумя способами: Вручную и Автоматически.
а) Автоматическая запись: Перед взлетом, текущее положение коптера будет записано полетным контроллером как Точка Взлета, после первого перемещения стика Газа после нахождения 6-ти или более спутников GPS.
б) Ручная запись: Если найдено 6 или больше спутников GPS, быстро переключите канал Х2 из положения Выкл (OFF) в положение ХоумЛок (Home Lock) от 3-х до 5-ти раз для записи текущей позиции коптера как новой Точки Взлета. Светодиод LED быстро заморгает индицируя успешную запись.
ШАГ 3: Включите режим ХоумЛок (Home Lock) переключив канал Х2 из положения Выкл (OFF) в положение ХоумЛок (Home Lock). Включение будет выполнено при наличии следующих условий:
а) Точка Взлета записана успешно.
б) 6-ть или более спутников GPS найдено.
в) Полетный контроллер находится в режиме Удержание по GPS (GPS Atti. Mod).
г) Коптер находится далее 10-ти метров от позиции Точка Взлета.
Вне зависимости от положения носа коптера, реальное направление полета будет направлено от Точки Взлета при наклонах вперед стика тангажа (Pitch), светодиод LED будет медленно моргать указывая что полетный контроллер находится в режиме ИКО (IOC).
ШАГ 4: Выход из режима ХоумЛок (HomeLock) осуществляется тремя способами:
а) Переключите канал Х2 в положение Выкл (OFF)
б) Переключите Режим полета (канал U) в положение Ручной (Manual), или выключите передатчик, или продолжайте полет в режиме Полета По Точкам.
в) Полетный контроллер автоматически выйдет из режима ИКО (IOC) если коптер будет находится ближе10 метровк Точке Взлета, и полетный контроллер переключится в Режим Удержания (Atti. Mode).
ШАГ 5: Повторное включение режима ХоумЛок (Home Lock): Если необходимо снова включить режим ХоумЛок (Home Lock), Вам необходимо сначала переключить тумблер канала Х2 в положение Выкл (OFF). После выполнения указанных выше 4-х условий, переключите канал Х2 в положение ХоумЛок (Home Lock), что приведет к повторной активации режима.
6. Что такое Intelligent Orientation Control (IOC)?
При обычном управлении коптер должен двигаться вперед при наклоне стика Тангажа (Elevator), то есть направление полета коптера, задается направлением в котором указывает нос платформы.
Но, при использовании Интеллектуального Контроля Ориентацией ИКО (IOC), направление полета и направление в котором указывает нос коптера могут не совпадать.
В Режиме КурсЛок (Course Lock) направление Вперед будет зависеть от записанного или перезаписанного направления на момент активации режима.
В Режиме ХоумЛок (Home Lock) направление Вперед противоположно точке Взлета или точке Дом, вне зависимости от направления носа коптера.
Для пилота это сильно упрощает управление полетом коптера в определенных ситуациях или при недостаточном опыте. Определите 2-х или 3-х позиционный тумблер на Вашем передатчике который будет переключать режимы ИКО (IOC) и подключите этот канал на вход Х2 полетного контроллера. В каждом из положений тумблера регулируйте расходы канала (end-point) так, чтобы слайдер Х2 точно вставал на позиции Хоум Лок (Home Lock), Курс Лок (Course Lock) и Выкл (OFF) и соответствующая надпись подсвечивалась голубым светом. Обратите внимание что, так же, переключая этот тумблер Вы будете записывать ориентацию полета коптера в соответствующих режимах.
7. Чем отличаются режимы ИКО ХоумЛок и КурсЛок?
КурсЛок:
В этом режиме, куда бы не был направлен нос коптера, реальное направление полета будет соответствовать записанному направлению «Вперед», и светодиод LED будет медленно моргать индицируя включенный режим ИКО (IOC) в полетном контроллере.
ХоумЛок:
Вне зависимости от положения носа коптера, реальное направление полета будет направлено от Точки Взлета при наклонах вперед стика тангажа (от себя) или реальное направление полета коптера будет направлено к Точке Взлета при наклонах стика тангажа назад (к себе), светодиод LED будет медленно моргать указывая что полетный контроллер находится в режиме ИКО (IOC).
Обратите внимание на то, что режим активируется на расстоянии более10 метров от Точки Взлета, и при возврате к Точке Взлета и достижении коптером зоны10 метров этот режим выключится автоматически!
Почему при срабатывании системы предупреждения о низком напряжении на аккумуляторе коптер практически не набирает высоту? При этом я вижу, что точка висения сильно сместилась вверх от позиции 50% газа, что происходит?
При наступлении Второго уровня Защиты (Second Level), светодиод LED включится. В это время центральная точка стика газа перемещается в позицию 90% расхода канала, чтобы исключить быстрый набор высоты. Вам необходимо срочно посадить коптер чтобы исключить его падение и другие неприятные последствия.
При перемещении центральной точки стика газа в позицию 90% расхода канала, коптер продолжает управляться по каналам Тангажа (Pitch), Крена (Roll) и Рысканья (Yaw) и реагирует на перемещения стика Газа.
8. Чем отличаются режимы отключения двигателей?
1. Старт моторов: Обычно стик газа перемещают вверх и моторы включаются. По соображениям безопасности в данном полетном контроллере моторы включатся, если произвести одну из четырех Стартовых комбинаций для запуска моторов (изображены на рисунке).
2. Остановка моторов: Существуют два способа остановки двигателей: Немедленная и Интеллектуальная.
* Немедленный способ остановки моторов: в любом полетном режиме, как только стик газа опустится ниже 10% своего диапазона, моторы остановятся. Они включатся снова если в течении 5-ти секунд поднять стик газа выше 10%. При запуске, после выполнения Стартовой комбинации стиками, если Вы не двигаете стик газа, то моторы выключатся через 3 секунды автоматически.
* Интеллектуальный способ остановки моторов: после запуска моторов Стартовой комбинацией, моторы вращаются без остановки. В режиме Ручной (Manual) можно остановить двигатели снова выполнив Стартовую комбинацию стиками. В любых других режимах работы полетного контроллера моторы выключатся если:
а) Вы не трогаете стик газа после старта моторов в течении 3-х секунд
б) Выполнена Стартовая комбинация стиками
в) Стик Газа ниже 10%, и после посадки прошло 3 секунды.
г) Угол наклона коптера составил более 70 градусов к горизонту, и стик газа ниже 10%.
9. Как правильно откалибровать передатчик?
1. Установите на передатчике, в выбранной модели, режим ACROBAT или PLANE.
2. Проверьте установку на Вашем передатчике настроек Endpoints в положение по умолчанию (100%), а так же все триммеры и сабтриммеры в положение 0. Установите все кривые в положение по умолчанию.
3. Нажмите кнопку СТАРТ для начала процедуры калибровки и двигайте всеми стиками из одного крайнего положения в другое, чтобы программа могла определить диапазоны их движения.
4. После этого нажмите кнопку ФИНИШ для окончания процедуры калибровки.
После калибровки, движения слайдеров на шкалах должны повторять движения стиков и соответствовать следующим эволюциям коптера:
(Т) Throttle или ГАЗ: Слайдер движется влево – коптер опускается, слайдер движется вправо – коптер поднимается.
(R) Rudder (Рысканье): Слайдер движется влево – коптер поворачивает нос влево, слайдер движется вправо – коптер поворачивает нос вправо.
(E) Elevator (Тангаж): Слайдер движется влево – коптер двигается назад, слайдер движется вправо – коптер двигается вперед.
(A) Aileron (Крен): Слайдер движется влево – коптер кренится влево, слайдер движется вправо – коптер кренится вправо.
5. Если движения производятся в обратном направлении, используйте кнопку справа (РЕВ/НОРМ) для реверсирования соответствующего канала.
10. Как понять что такое Тангаж, Roll или Yaw?
Тангаж (Pitch) — наклоняем стик вперед = летим вперед, наклоняем стик назад = летим назад.
Крен (Roll) — наклоняем стик вправо = коптер кренится вправо, наклоняем стик влево = коптер кренится влево.
Рысканье (Yaw или Rudder) — наклоняем стик вправо = коптер поворачивает нос вправо, наклоняем стик влево = коптер поворачивает нос влево.
11. Как правильно разместить приемник GPS?
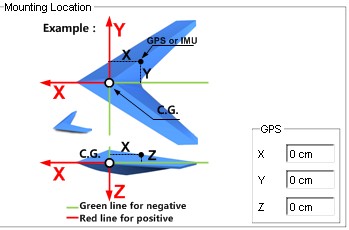
Разместите модуль GPS в любом удобном для Вас месте, вдали от любых излучающих устройств или двигателей. Оптимальное размещение — на штанге, выше плоскости вращения двигателей чтобы их магнитные поля никак не влияли на магнитометр расположенный в корпусе GPS. Установите на Вашу раму всю необходимую аппаратуру для полета: камеры, OSD, аккумуляторы и тому подобное. Сбалансируйте размещение Вашего оборудования таким образом чтобы ЦТ (Центр Тяжести) находился в центре рамы.
После размещения моудля GPS и балансирования оборудования на раме, измерьте расстояния от центра датчика GPS до ЦТ Вашей рамы и введите их в соответствующие поля в программе Assistans. Черная точка на рисунке обозначает модуль GPS, белая точка с черной обводкой обозначает ЦТ Вашей платформы. Расстояния необходимо измерить в сантиметрах. Обратите внимание на различное обозначение размещения:
— Если модуль GPS установлен позади, слева или выше ЦТ по соответствующей оси (зеленые линии), то расстояния необходимо вводить со знаком минус (отрицательные значения), например X= -5, Y= -7, Z= -4.
— Если модуль GPS установлен впереди, справа или ниже ЦТ по соответствующей оси (красные линии), то расстояния необходимо вводить обычным образом (положительные значения), например X= 5, Y= 7, Z= 4.
Минимальное расстояние от любого двигателя до модуля GPS — 10 см!
Логотип DJI должен быть обращен в небу, стрелка на корпусе модуля GPS должна быть ориентирована строго вперед по направлению полета!
Внимание! При неправильном указании места размещения модуля GPS могут появиться осциляции (раскачивания) и поведение платформы после взлета непредсказуемо!!! При этом не гарантируется точность удержания позиции в режиме GPS!
12. Как запустить двигатели?

Запуск двигателей происходит при активации системы одной из четырех комбинаций стиков на передатчике: Оба стика вниз и влево, оба стика вниз и вправо, оба стика вниз и в разные стороны «развести» или оба стика вниз и к центру «свести».
13. Как отрегулировать холостой ход двигателей?
Холостой ход двигателей регулируется во вкладке Motor Mixer. Среднее положение Recommand оптимально, но если у Вашей платформы двигатели с высоким KV при активации запуска двигателей платформа может начать взлет, таким образом её не удастся благополучно посадить. В таком случае Вы можете уменьшить холостой ход. Если Ваши двигатели с низким KV при активации двигателей, они не будут вращаться. В таком случае, увеличьте значение холостого хода.
14. Каковы режимы мигания светодиода и индикация включения тех или иных режимов?
В индикации Naza все как в жизни, если горит красный – стой, желтый – ни так ни сяк, зеленый – все хорошо можно лететь. Если Вы совершаете полеты вне закрытого помещения, настоятельно рекомендуется при первом подключении аккумулятора включить режим GPS и дождаться захвата сигналов от спутника. На это уйдет совсем немного времени, но у Вас будет уверенность что платформа при неблагоприятных условиях вернется на точку взлета, а не улетит к месту Вашего крайнего полета.
Сразу после подключения аккумулятора индикатор недолго дает последовательные вспышки красного – желтого — зеленого цвета. Это проводится внутренняя диагностика и определение устройств на шине CAN.
Далее по режимам:
Manual = нет индикации
Attitude = желтое моргание светодиода
GPS = зеленое моргание светодиода
IOS = (это режимы HomeLock и CurseLock) – идущие друг за другом вспышки зеленого и желтого цвета
Во всех вышеперечисленных режимах при подключенном модуле GPS:
Три красных вспышки = найдено менее 5-ти сигналов со спутников
Две красных вспышки = найдено менее 6-ти сигналов со спутников
Одна красная вспышка = найдено меньше 7-ми сигналов со спутников
При такой индикации удержание в точке будет посредственным или плохим. Возможен дрейф в разные стороны.
Отсутствие красных вспышек говорит о более чем 8-ми найденных сигналов со спутников – удержание в точке будет хорошим.
Во всех вышеперечисленных режимах — долгое включение светодиода красным цветом – есть ошибки стабилизации. Рекомендуется прекратить резкие перемещения платформы и зависнуть для сброса ошибок.
В режимах Attitude (желтые вспышки) и GPS (зеленые вспышки) перед стартом двигателей будет выводиться дополнительная индикация:
Одиночная вспышка = все стики управления, кроме стика газа, находятся в центре.
Двойная вспышка = все стики управления, кроме стика газа, не установлены в центр.
После старта двигателей и перевода стика газа в положение более чем 10% газа, возможна аналогичная сигнализация с аналогичной трактовкой.
В режимах HomeLock и CurseLock (последовательная вспышка зеленым и желтым) перед стартом двигателей будет выводиться дополнительная индикация:
Желтый — зеленый = все стики управления, кроме стика газа, находятся в центре.
Желтый – зеленый – зеленый = все стики управления, кроме стика газа, не установлены в центр.
После старта двигателей и перевода стика газа в положение более чем 10% газа, возможна аналогичная сигнализация с аналогичной трактовкой.
Частые вспышки желтого цвета = потеря сигнала управления.
Частые вспышки красного цвета = низкое напряжение на аккумуляторе или другие ошибки.
Индикация при калибровке компаса указана в секции про калибровку.
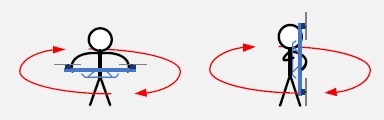
15. Как откалибровать компас?
Необходимо повторно калибровать компас в случаях перемещения точки крепления модуля GPS на раме и в случае изменения конфигурации коптера.
Не калибруйте компас на автомобильных стоянках, вблизи больших металлических структур (коммуникации, мачты ЛЭП) на земле или под землей. Не пользуйтесь и не носите с собой электронные приборы (сотовые телефоны, планшеты, фото и видеокамеры) во время калибровки.
Войдите в процедуру калибровки с помощью переключателя режимов полета, переключая тумблер из режима GPS в режим Manual от 6-ти до 10-ти раз. Важно: неоднократно отмечено что переключение из «GPS в Manual» и обратно = считается за один раз! Светодиод полетного контроллера должен загореться постоянным желтым цветом. После этого вращайте коптер в горизонтальной плоскости до тех пор пока не загорится зеленый сигнал светодиода. После этого вращайте коптер в вертикальной плоскости до тех пор пока зеленый сигнал не погаснет. Если процедура калибровки прошла успешно то индикация погаснет, если появится часто мигающий красный сигнал это означает что процедура калибровки прошла со сбоем и необходимо повторить её. Перед повтором процедуры переместитесь в другое место.
Нет необходимости точно вращать параллельно и перпендикулярно горизонту платформу при калибровке, достаточно выдерживать угол в 45 градусов между вертикальной и горизонтальной плоскостью вращения коптера.
16. Почему коптер не удерживается в точке, летает по спирали?
Проверьте настройку и включение режима «GPS» в программе Assistans. Проверьте, правильно ли указаны расстояния от ЦТ Вашей платформы до модуля GPS. Перепроложите кабель от модуля GPS как можно дальше от силовых проводов, передатчиков видео, датчиков потребления энергии систем телеметрии. Проведите повторную калибровку магнитометра (компаса).
17. В Beta 1.6 есть окно регулировки Advance Parameters - что это?
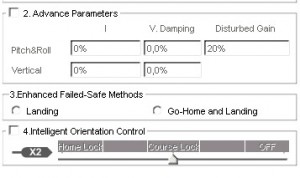
Эта фишка была заявлена в Beta версии 1.6 для Naza, но за неделю до официального релиза эти настройки изъяли из программы. Наверное, не очень качественно работает или не работает вообще. Напомню, что модули GPS у Naza и Wookong отличаются аппаратно и программно.
Введенные значения, после нажатия кнопки «Write» и отсоединения шнура связи от компьютера могут смениться на «100%», но тем не менее будут оказывать воздействие! Будьте осторожны!
Значения по умолчанию в подавляющем большинстве случаев подходят для всех условий. Но, для некоторых специфических конструкций и условий можно попробовать улучшить управление.
«I» — Компенсация ошибки накапливающейся при нахождении платформы в статическом состоянии.
«V.Damping» — Работает только в режиме GPS.
При большом значении, платформа будет тормозить активнее после отпускания стиков управления. При этом максимальная скорость перемещения станет меньше. При меньшем значении, платформа будет тормозить плавно, и для остановки ей понадобится больше времени, чем при высоких значениях. При этом максимальная скорость перемещения станет больше. Слишком большое или слишком маленькое значение приведет к нестабильности зависания в режиме GPS.
«Disturbed Gain» — Только для чрезвычайных, особых условий работы в GPS режиме. Просьба не трогать этот параметр.
18. Как настроить переключатель режимов?
Войдите в меню передатчика, в регулировку endpoints канала на который у Вас подключен тумблер переключения режимов полета (обычно канал №5). Смещением уровней добейтесь подсветки синим цветом надписей Attitude и Manual в программе. Обычно эти уровни составляют около 80-85%.
Начиная с версии Assistans 1.6, тумблер переключателя режимов можно настроить на три положения: GPS, Attitude и Manual. При подключенном модуле GPS первый режим будет активироваться и Ваша платформа будет удерживаться в точке с использованием сигналов со спутников системы глобального позиционирования GPS. При отключенном модуле GPS контроллер Naza переключится в режим Attitude, без удержания в точке.
Обратите внимание что функции «удержание в точке», «возврат на точку старта», «НоумЛок» и «КурсЛок» будут работать только в положении тумблера переключателя режимов в положение «GPS» при подключенном модуле GPS к контроллеру Naza.
19. У меня только двухпозиционный тумблер, как мне настроить переключатель режимов?
Как правило, режим Manual используется очень небольшим количеством пилотов, если Вы его не используете — можете его не настраивать. Настройте только режимы «GPS» и «Attitude» как указано выше.
20. Настройка Фейл Сейф для Spectrum.
Настройка FS на NAZA и Spektrum DX8 и не только.
1. Назначаем на канал приемника подключенного ко входу «U» NAZA 3х позиционный переключатель.
2. Выставляем «газ» больше 10% (15%-20%) и 3х позиционный переключатель в среднее положение. Выключаем аппаратуру.
3. Вставляем «Bind» перемычку в приемник и подаем питание.
4. Вынимаем перемычку из приемника. Светодиод продолжает мигать.
5. Включаем аппаратуру с зажатой кнопкой Trainer/Bind. Биндимся.
6. Переназначаем на канал приемника подключенного ко входу «U» NAZA 2х позиционный переключатель.
7. В меню настроек Servo Setup — Travel уменьшаем расход на канале переключателя до надежного включения режимов «А» и «М».
8. Проверяем в Assistant работу FS. При выключении педатчика газ должен быть больше 10%, а движок переключателя режимов будет ровно по середине. Что и должно обеспечить надежное включение режима FS.
Автор: Константин Дьяконов aka kYd
21. Режимы Назы М, А и GPS на 3х позиционном тумблере Турниги.
Для стоковой прошивки
Я миксом сделал трехпозиционник и gear (в самолетном режиме), миксуем на gear три режима в «prog.mix», а gear на 5 канал вешаем (в aux-ch ), а 6 оставляем пустым, и вуаля, имеем двухпозиционник на 5 канале (gear) и трехпозиционник на 6 канале (U).
mix1:
state act
master gyr
slave flp
offset 000
uprate -100
dnrate 100
sw nor
mix2:
state act
master gyr
slave flp
offset 000
uprate 004
dnrate -004
sw id1
mix3:
state act
master gyr
slave flp
offset 000
uprate 100
dnrate -100
sw id2
Чтоб «посинели» «М» и «ЖПС» подогнал E.Point на 6ом канале (FLP) до 092% и 067%
Центр только не попадал в «А»
Подогнал в «mix2» «dnrate» до «-013». Посинела «А».
Автор: devv aka Евгений Дегтянников
22. Как настроить 3-х позиционный переключатель Turnigy 9x для Хоумлок и Курслок?
Для Turnigy 9x (штатная прошивка) рецепт:
Режимы переключаем с помощью Gear (2х поз. переключатель) и 3х поз. переключатель полетных режимов:
Аппа в самолетном режиме.
1. Меню aux-ch, channel 5 = gear, channel 6 = NULL
2. Меню prog.mix => mix 1: mix1 = act, master=gyr, slave=flp, offset=000, uprate=-67, dnrate=-16, sw=NOR
3. Меню prog.mix => mix 2: mix2 = act, master=gyr, slave=flp, offset=000, uprate=-67, dnrate=-96, sw=ID1
4. Меню prog.mix => mix 3: mix3 = act, master=gyr, slave=flp, offset=000, uprate=-67, dnrate=-54, sw=ID2
6й (!) канал приемника подключаем во вход U Naza
Gear Off:
1поз = Atti, 2поз = GPS, 3поз = FailSafe
Gear On:
1-3поз = Manual
Автор: ilyagry
23. У меня двухпозиционный тумблер и я не использую режим Manual - как мне откалибровать компас?
Для этого надо создать еще одну модель в РУ и настроить переключатель на режим Manual и GPS, и включать эту модель когда необходимо откалибровать компас. А летать на модели, где стоят режимы Atti и GPS. Автор Covax. Спасибо большое Сережа!
Второй вариант: Используя программу Assistans настройте тумблер на переключение режимов GPS и Manual. После чего произведите процедуру калибровки. Затем вернитесь к программе и переустановите тумблер на удобную для Вас коммутацию полетных режимов. Например GPS и Attitude.
24. Особенность передатчиков Мультиплекс Про!
Вход в процедуру калибровки компаса был невозможен и откалибровать компас не удавалось. Причина — задержка на канале 0,5-1сек на щелчок (при сравнении по сервомонитору с др. тумблером). На Мультиплексе Про — бойтесь режима СПОЙЛЕР! При назначении тумблера, назвав его ближайшим свободным ругательством получилось что, помимо числовых задержек отработки сигнала (коих как минимум две, которые и вводили в заблуждение, т.к. стояли по нулям) задержка зашита в самом названии канала СПОЙЛЕР (около 1 сек на 100% расхода).
Не, ну правильно, немцам же не может прийти в голову, что кто-то в России назначит канал спойлер, который совсем не спойлер… Автор Andrey Lopatko
25. Особенность приемников Futaba S.Bus - перепутаны каналы!
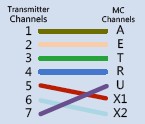
Обратите внимание, что при подключении приемника Futaba по системной шине S.Bus каналы с 5-го по 7-ой изменят свое назначение. Канал управления режимами в обычных схемах установленный на 5-ый канал теперь займет 7-ой канал, 5-ый канал станет Х1, а 6-ой станет Х2. Спасибо aktset.
26. Naza из Kit`а, может полететь сразу из коробки? Или обязательно нужно подключать к компу и настраивать?
Собранный коптер с полетным контроллером Naza необходимо подключить к компьютеру с установленной программой Assistans! Так как без начального конфигурирования контроллер не знает чем и от чего он управляется. Первоначальные необходимые настройки: Тип коптера (три-, квадро- или гексакоптер), Конфигурация коптера (летаем развалом или лучем вперед, иными словами + или х), Тип приемника (Futaba Bus или обычный), Калибровка передатчика (Контроллеру необходимо знать каковы расходы у ручек Вашего передатчика), при этом необходимо подключить к контроллеру только 4 канала от приемника. Это необходимый минимум! Все остальные регулировки и настройки можно сделать позже: например настройка гейнов, настройка тумблера переключения полетных режимов.
27. Какая аппаратура подойдет?
Любая авиационная аппаратура. Самолетная и планерная программа подходят сразу, в вертолетной необходимо выключить микшеры тарелки перекоса.
28. Сколько необходимо каналов для управления?
Минимум 4 канала. Naza будет работать в режиме Attitude. Кабель в разъем U подключать не нужно.
Для комфортного управления вам понадобится 5ый канал для переключения режимов «Стабилизация» и «Мануал». Дополнительный 6-ой канал позволит регулировать чувствительность системы или управлять одной осью подвеса камеры. Дополнительный 7-ой канал добавит регулировку вторым каналом чувствительности системы.
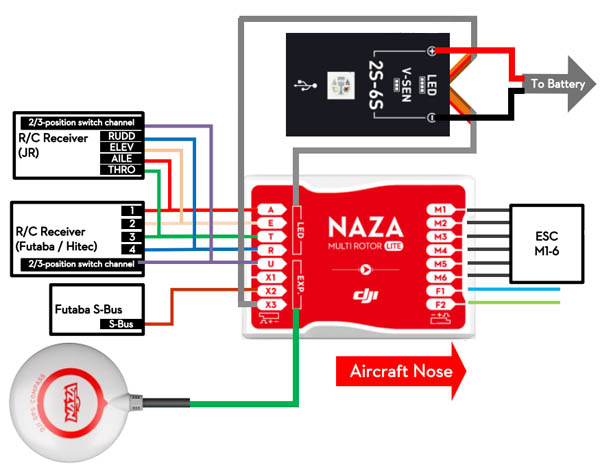
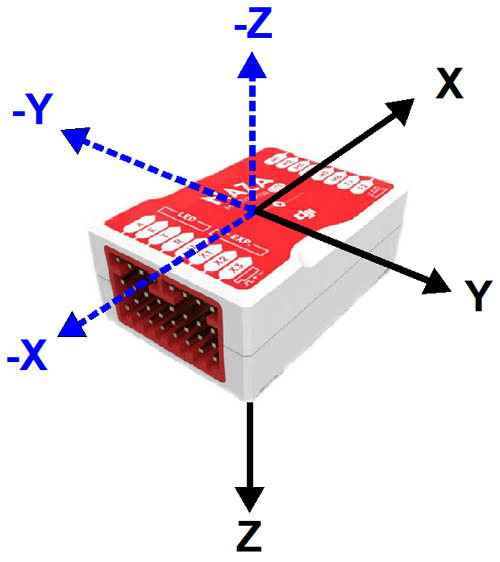
29. Где у контроллера «перед»?
Контроллер необходимо располагать выводами на моторы (обозначены М1-М6) по направлению «Вперед» полета коптера. С противоположной стороны корпуса контроллера подключаются выводы приемника и BEC.
30. От каких аккумуляторов может питаться контроллер Naza?
Поставляемый в комплекте BEC может питаться от 2х до 6ти банок литий-полимерных аккумуляторов.
31. Где располагать контроллер?
Располагать корпус необходимо стилизованной надписью NAZA только вверх. При иной ориентации корректная работа не гарантируется.
Рекомендованное место размещения корпуса контроллера – геометрический центр в котором пересекаются оси лучей рамы, говоря проще – центр рамы при одинаковой длине лучей. Рекомендуется располагать контроллер в плоскости вращения винтов и в непосредственной близости к ЦТ (центру тяжести) коптера.
Используйте двухсторонний скотч входящий в комплект поставки.
32. Где располагать BEC со светодиодом?
Рекомендуется располагать светодиод в хорошо просматриваемом месте рамы, чтобы при полете коптера Вы могли четко видеть мигание для контроля режимов работы контроллера. Обычно располагается в задней части центра рамы направлением к пилоту или вниз.
Используйте двухсторонний скотч входящий в комплект поставки.[/su_spoiler]
33. Где расположить приемник?
Рекомендуется располагать приемник в непосредственной близости от контроллера. В комплекте поставки NAZA есть удобные жгуты (серво кабели) для подключения, их длинна позволит с комфортом расположить приемник в удобном месте без затенения антенн аккумулятором или моторами.
34. Как подключать приемник?
Если у Вас система радиоуправления от Futaba и комплектный приемник поддерживает шину S.Bus, подключите согласно инструкции к Futaba – один из кабелей с разъемами из комплекта поставки. Необходим один кабель. Сущность системы S.Bus в том, что по одному кабелю передаются все каналы управления доступные для Вашего передатчика. И выберите в программе Assistans опцию Receiver Type – «D-Bus».
Если у Вас система радиоуправления другого производителя – соедините входящими в комплект поставки NAZA кабелями с разъемами приемник и контроллер используя, один кабель на один канал.
35. Как подключить регуляторы к двигателям или изменить направление вращения?
У безколлектороных регуляторов имеются три провода управления и питания двигателями. Если в регуляторе не предусмотренна смена направления вращения путем программирования, достаточно поменять местами два любых разъема.
36. Как подключать регуляторы?
DJI строго рекомендует вытащить и изолировать средний провод из разъема регулятора, как правило он имеет красный цвет. Обычно, этот провод питает приемник и по нему подводится питание +5В. Для NAZA в этом нет необходимости, так как контроллер питается от своего, отдельного BEC. Отключение провода «земля» обычно имеющего черный или коричневый цвет необязательно.
Если у Вас NAZA KIT в комплекте которого поставляются регуляторы белого цвета от DJI ESC 30A OPTO или у Вас регуляторы от другого поставщика с опторазвязкой по питанию то вышеописанное к этим регуляторам не относится и ничего делать не нужно.
37. С какими регуляторами NAZA будет работать?
Рекомендованы для применения фирменные регуляторы от DJI Innovatoins, но и другие регуляторы будет прекрасно работать.
Все хоббийные регуляторы, со стандартной или с модифицированной прошивкой (так называемые «перепрошитые, использующие прошивки от SimonK»), могут быть подключены. Исключение составляют регуляторы I2C и UltraPWM так как они спроектированы для других типов полетных контроллеров и у них другой интерфейс управления со стороны полетного контроллера. У обычных регуляторов диапазон газа от 1000 до 2000 мкс. У UltraPWM диапазон от 200 до 1200 мкс.
Без проблем работает абсолютное большинство регуляторов таких марок как HobbyKing, RCTimer, GAUI, Mistery, Maytech, Avionix.
Отмечена особенность работы регуляторов марки Turnigy Plush. Версия на контроллере Atmega до 2011 года выпуска частично или полностью неработоспособна с NAZA. Например версия 18А работает только на выходах M1, М2, М4, М6. Версия 30А не работает вообще, регуляторы при инициализации переключаются в режим программирования.
После смены контроллера на Silab некоторые регуляторы Plush работают хорошо, в том числе версии на 10А, 18А и 30А.
В некоторых случаях можно заставить работать регуляторы серии Plush увеличив расход газа до 125% с последующей перекалибровкой аппаратуры в Assistans.
38. Какая Windows необходима?
Ркомендуется Windows SP3 или Vista. Работа с другими Windows не гарантируется. Возможны проблемы с установкой драйвера и определением контроллера в среде Windows. Подтверждена работа Assistans в среде Windows Vista 64 bit.
39. Почему коптер постоянно сносит в сторону и он не висит на одном месте?
Контроллер NAZA имеет датчики для выравнивания в горизонт, но не имеет датчиков для ориентации в пространстве. Для четкого висения в точке необходим магнитометр для нахождения магнитного полюса планеты и датчик позиционирования GPS. Таким образом, NAZA не знает, что она смещается относительно Земли и «уплывает».
40. Как откалибровать горизонт?
Горизонт не калибруется. Калибровка произведена на производстве.
41. Светодиод часто мигает оранжевым. Что это?
Не включен передатчик, не подключен приемник, не сконфигурирован переключатель режимов работы контроллера (в программе Assistans).
42. Как работает бародатчик?
Идеология управления претерпела изменения, раньше ручка газа задавала обороты и пилот регулируя их устанавливал высоту полета. В NAZA алгоритм изменен – ручка газа по сути превращена в регулятор вертикальной скорости. Если ручка газа находится в середине – высота не меняется и происходит удержание на этой высоте. Смещая ручку газа вверх мы даем команду на увеличение высоты удержания, а контроллер сам увеличивает частоту вращения моторов. Происходит набор высоты. Смещая ручку газа вниз мы даем команду снизить высоту. Таким образом бародатчик включен постоянно и удерживает заданную высоту.
43. Мой коптер упал когда я опустил ручку газа вниз до упора, почему?
Ручка газа имеет 10% «мертвой зоны» в начале хода (внизу) для включения и выключения моторов. Поэтому, опускать ручку газа до упора вниз в полете не рекомендуется – произойдет выключение моторов.
44. Какая крутилка отвечает за наклон камеры при активном подвесе?
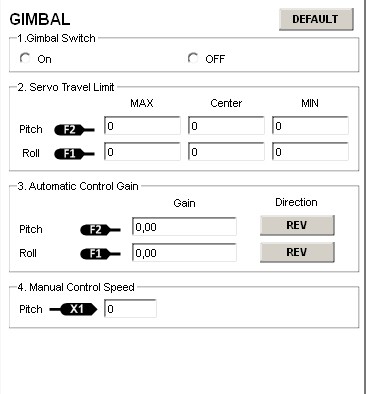
При активном подвесе, ручка которая регулирует наклон камеры на подвесе должна быть подключена на канал который включен в полетный контроллер в разъем Х1.
45. Как влияет настройка GAIN на поведение коптера?
Basic Gain — Это чувствительность общей или базовая составляющая управляемости коптера. Чем число больше — тем активнее будет отклик на движения ручек на передатчике.
Vertical Gain — Это чувствительность барометра. Чем выше число — тем быстрее или резче коптер удерживает высоту.
Attitude Gain — Это плавность выравнивания. Чем число больше — тем активне, резче выравнивание. Чем число меньше — тем плавнее и вальяжнее будет коптер.
Все эти параметры можно регулировать с передатчика назначив на каналы 6 и 7 соответствующие Gain.
46. Как подключить BEC?
BEC имеет два провода, красный это плюс, черный это минус. Припаяйте эти провода к разъему подключения аккумулятора или к «плате-раздатке» на Вашем коптере.
47. Где инструкция?
Инструкция располагается на сайте DJI или на сайте дистрибьютора.
Ссылки — http://www.dji.com/download/naza-m-v2-downloads/
48. Где диск с программой?
Программа Assistans и драйвер NAZA для Windows можно скачать на сайте производителя.
Ссылка на программу и драйвер http://www.dji.com/download/naza-m-v2-downloads/
49. Почему через некоторое время в полете включается режим FailSafe и коптер приземляется?
Аккумулятор вырабатывает запасенную ёмкость и происходит переключение в режим принудительной посадки из-за просадки по питанию.
Если действие происходит зимой на открытом воздухе — вероятной причиной может быть низкая температура окружающего воздуха. У литий-полимерных аккумуляторов резко падает отдача тока и емкость при охлаждении. Таким образом, напряжение питания падает и NAZA включает «красный» режим, а следовательно и приземляет коптер чтобы избежать аварии.
50. Как включить режим удержания высоты?
Режим удержания высоты включен постоянно при активированном режиме работы Attitude. Выключить его возможно переводом контроллера в режим Manual.
51. Коптер не выравнивается в горизонт и не работает удержание высоты.
Переведите систему в режим Attitude.
Проверьте настройку GAIN, в крайних, низких значениях (около 50%) возможна неадекватная работа контроллера.
52. Где включить режим индикации израсходованной энергии?
Полетный контроллер NAZA не имеет встроенных средств для контроля израсходованной энергии из аккумулятора.
53. Коды ошибок отображаемые Assistans.
CFG-ERR8 — Неверная конфигурация. Возможно неправильно откалиброван передатчик.
CFG-ERR — Неверная конфигурация. Возможно не совпадают версии прошивки и Ассистанс. Неудачная калибровка передатчика, перекалибруйте передатчик и перезапустите Назу.
VOL-LOW [4] — Низкое напряжения силовой батареи
SN-ERR — Серийный номер не совпадает, обратитесь в саппорт или к дилеру.
VOL-LOW[6] — Низкое напряжения силовой батареи
IMU-ERR — IMU ERROR, обратитесь к дилеру или в саппорт DJI.
X1-ERR — Ошибка при определении переключателя или нет сигнала от передатчика, возможно не работает вывод с приемника.
X2-ERR — Ошибка при определении переключателя или нет сигнала от передатчика, возможно не работает вывод с приемника.
PMU-ERR — Проверьте соединения аккумулятора, полетного контроллера Наза и PMU.
RX-ERR — Неправильный выбор типа сигнала получаемого от приемника. Перезапустите контроллер.
COMPASS-ERR — Ошибка компаса, перезапустите контроллер. Если ошибка повторяется, обратитесь к дилеру или в саппорт DJI.
ERROR [25] — Сбой инициализации датчиков IMU, возможно после аварии, initialization failure, обратитесь к дилеру или в саппорт DJI.
ERROR [26] — Проведите Advanced калибровку.
ERROR [27] — GPS не откалиброван или сильные электромагнитные помехи. Перейдите на другое место и перекалибруйте компас.
54. Не запускаются двигатели, почему?
Множество причин может быть. Обратите внимание на подключение питания и его полярность. Проверьте «забинден» ли приемник. Проверьте правильность установки модели на передатчике. Проверьте Endpoints в установках передатчика, при микшировании или активации «расходов» канала газа стик находится в нижней позиции но передаются на приемник данные об уменьшенном диапазоне.
Источник: http://flydrones.ru
Просмотров: 29312
|
